
| 9. Ecuaciones diferenciales | 9.10. Sistemas lineales de ecuaciones diferenciales | Ejercicios propuestos para el Capítulo 9.10.4 |
9.10.4 Sistemas homogéneos con coeficientes constantes I
Ahora comenzaremos nuestro estudio del sistema homogéneo
y′ = Ay, (9.10.4.1)
donde A es una matriz de constantes n × n. Como A es continua en (−∞, ∞), el Teorema 9.10.2.1 implica que todas las soluciones de (9.10.4.1) están definidas en (−∞, ∞). Por lo tanto, cuando hablamos de soluciones de y′ = Ay, nos referiremos a soluciones en (−∞, ∞).
En esta sección suponemos que todos los valores propios de A son reales y que A tiene un conjunto de n vectores propios linealmente independientes. En las siguientes dos secciones consideraremos los casos donde algunos de los valores propios de A son complejos, o donde A no tiene n vectores propios linealmente independientes.
En el Ejemplo 9.10.3.2 mostramos que las funciones vectoriales
 y
y 
forman un conjunto fundamental de soluciones del sistema
 (9.10.4.2)
(9.10.4.2)
pero no mostramos cómo obtuvimos y1 e y2 en primer lugar. Para ver cómo se pueden obtener estas soluciones escribimos (9.10.4.2) como
 (9.10.4.3)
(9.10.4.3)
y buscamos soluciones de la forma
y1 = x1eλt y y2 = x2eλt, (9.10.4.4)
donde x1, x2 y λ son constantes por determinar. Diferenciando (9.10.4.4), obtenemos
y′1 = λx1eλt y y′2 = λx2eλt.
Sustituyendo esto y (9.10.4.4) en (9.10.4.3) y cancelando el factor común eλt, se obtiene

Para un λ dado, este es un sistema algebraico homogéneo, ya que se puede reescribir como
 (9.10.4.5)
(9.10.4.5)
La solución trivial x1 = x2 = 0 de este sistema no es útil, ya que corresponde a la solución trivial y1 ≡ y2 ≡ 0 de (9.10.4.3), que no puede formar parte de un conjunto fundamental de soluciones de (9.10 .4.2). Por lo tanto, consideramos solo aquellos valores de λ para los cuales (9.10.4.5) tiene soluciones no triviales. Estos son los valores de λ para los cuales el determinante de (9.10.4.5) es cero; esto es,
que tiene las soluciones λ1 = 2 y λ2 = −1.
Tomando λ = 2 en (9.10.4.5), se obtiene
lo que implica que x1 = −x2/2, donde x2 puede elegirse arbitrariamente. Elegir x2 = 2 produce la solución y1 = −e2t, y2 = 2e2t de (9.10.4.3). Podemos escribir esta solución en forma vectorial como
 (9.10.4.6)
(9.10.4.6)
Tomando λ = −1 en (9.10.4.5) se obtiene el sistema

entonces x1 = −x2. Tomando x2 = 1 aquí se obtiene la solución y1 = −e−t, y2 = e−t de (9.10.4.3). Podemos escribir esta solución en forma vectorial como
 (9.10.4.7)
(9.10.4.7)
En (9.10.4.6) y (9.10.4.7) los coeficientes constantes en los argumentos de las funciones exponenciales son los valores propios de la matriz de coeficientes en (9.10.4.2), y los coeficientes vectoriales de las funciones exponenciales son vectores propios asociados. Esto ilustra el siguiente teorema.
Teorema 9.10.4.1
Supongamos que la matriz de constantes A de tamaño n × n tiene n valores propios reales λ1, λ2, . . ., λn (que no es necesario que sean distintos) con vectores propios asociados linealmente independientes x1, x2, . . ., xn. Entonces las funciones
y1 = x1eλ1t, y2 = x2eλ2t, . . ., yn = xneλnt
forman un conjunto fundamental de soluciones de y′ = Ay; es decir, la solución general de este sistema es
y = c1x1eλ1t + c2x2eλ2t + · · · + cnxneλnt. ♦
Prueba:
Derivando yi = xieλi t y recordando que Axi = λixi se obtiene
y′i = λixieλi t = Axieλi t = Ayi.
Esto muestra que yi es una solución de y′ = Ay. ♦
El wronskiano de {y1, y2, . . ., yn} es

Como las columnas del determinante de la derecha son x1, x2, . . . , xn, que se supone que son linealmente independientes, el determinante es distinto de cero. Por lo tanto, el Teorema 9.10.3.3 implica que {y1, y2, . . ., yn} es un conjunto fundamental de soluciones de y′ = Ay.
Definición 9.10.4.1 Polinomio Característico
Para un sistema lineal homogéneo de ecuaciones diferenciales con coeficientes constantes expresado en forma matricial como:
\[ \mathbf{y}’ = A\mathbf{y} \]
donde $A$ es la matriz de coeficientes y $\mathbf{y}$ es el vector de funciones desconocidas, el Polinomio Característico $p(\lambda)$ de la matriz $A$ se define como el determinante de la matriz $(\mathbf{A} – \mathbf{\lambda I})$.
Formalmente, el polinomio característico es:
\[ \mathbf{p(\lambda) = \det(A – \lambda I)} \]
donde $\lambda$ es la variable (el valor propio) e $I$ es la matriz identidad del mismo orden que $A$.
La Ecuación Característica
Los valores de $\lambda$ que resuelven el sistema se conocen como los valores propios (o autovalores) de la matriz $A$ y se obtienen al resolver la Ecuación Característica, que se forma al igualar el polinomio a cero:
\[ \mathbf{\det(A – \lambda I) = 0} \]
Ejemplo ilustrativo 9.10.4.1
(a) Encuentre la solución general de
 (9.10.4.8)
(9.10.4.8)
(b) Resuelva el problema de valor inicial
 (9.10.4.9)
(9.10.4.9)
Solución:
(a) El polinomio característico de la matriz de coeficientes A en (9.10.4.8) es

Por lo tanto, λ1 = 6 y λ2 = −2 son valores propios de A. Para obtener los vectores propios, debemos resolver el sistema
 (9.10.4.10)
(9.10.4.10)
con λ = 6 y λ = −2. Al establecer λ = 6 en (9.10.4.10), se obtiene

lo que implica que x1 = x2. Tomando x2 = 1 se obtiene el vector propio

entonces

es una solución de (9.10.4.8). Al establecer λ = −2 en (9.10.4.10) se obtiene
lo que implica que x1 = −x2. Tomando x2 = 1 se obtiene el vector propio

entonces

es una solución de (9.10.4.8). Del Teorema 9.10.4.1, la solución general de (9.10.4.8) es
 (9.10.4.11)
(9.10.4.11)
(b) Para satisfacer la condición inicial en (9.10.4.9), debemos elegir c1 y c2 en (9.10.4.11) de modo que

Esto es equivalente al sistema

entonces c1 = 2, c2 = −3. Por lo tanto, la solución de (9.10.4.9) es

o, en términos de componentes,
y1 = 2e6t + 3e−2t, y2 = 2e6t − 3e−2t.
Ejemplo ilustrativo 9.10.4.2
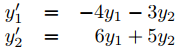
(a) Encuentre la solución general de
 (9.10.4.12)
(9.10.4.12)
(b) Resuelva el problema de valor inicial
 (9.10.4.13)
(9.10.4.13)
Solución:
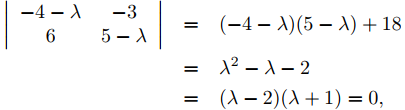
(a) El polinomio característico de la matriz de coeficientes A en (9.10.4.12) es

Por lo tanto, los valores propios de A son λ1 = 2, λ2 = 3 y λ3 = −1. Para encontrar los vectores propios, debemos resolver el sistema
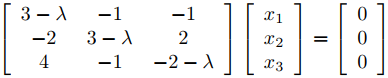 (9.10.4.14)
(9.10.4.14)
con λ = 2, 3, −1. Con λ = 2, la matriz aumentada de (9.10.4.14) es
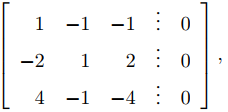
que es equivalente por filas a

Por lo tanto, x1 = x3 y x2 = 0. Tomando x3 = 1, se obtiene

como solución de (9.10.4.12). Con λ = 3, la matriz aumentada de (9.10.4.14) es

que es equivalente por filas a
Por lo tanto, x1 = x3 y x2 = −x3. Tomando x3 = 1, se obtiene

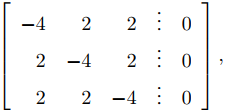
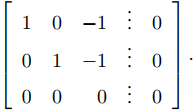
como solución de (9.10.4.12). Con λ = −1, la matriz aumentada de (9.10.4.14) es

que es equivalente por filas a
Por lo tanto, x1 = x3/7 y x2 = −3x3/7. Tomando x3 = 7, obtenemos
como solución de (9.10.4.12). Por el Teorema 9.10.4.1, la solución general de (9.10.4.12) es

que también se puede escribir como
 (9.10.4.15)
(9.10.4.15)
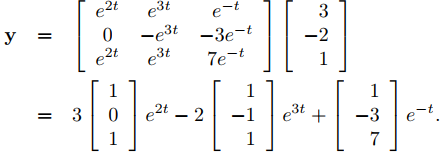
(b) Para satisfacer la condición inicial en (9.10.4.13) debemos elegir c1, c2, c3 en (9.10.4.15) de modo que

Resolviendo este sistema se obtiene c1 = 3, c2 = −2, c3 = 1. Por lo tanto, la solución de (9.10.4.13) es
 ♦
♦
Ejemplo ilustrativo 9.10.4.3
Encuentre la solución general de
 (9.10.4.16)
(9.10.4.16)
Solución:
El polinomio característico de la matriz de coeficientes A en (9.10.4.16) es

Por lo tanto, λ1 = 1 es un valor propio de multiplicidad 1, mientras que λ2 = −5 es un valor propio de multiplicidad 2.
Los vectores propios asociados con λ1 = 1 son soluciones del sistema con matriz aumentada
que es equivalente por filas a
Por lo tanto, x1 = x2 = x3, y elegimos x3 = 1 para obtener la solución
 (9.10.4.17)
(9.10.4.17)
de (9.10.4.16). Los vectores propios asociados con λ2 = −5 son soluciones del sistema con matriz aumentada

Por lo tanto, los componentes de estos vectores propios solo necesitan satisfacer la condición única
x1 + x2 + x3 = 0.
Como aquí solo hay una ecuación, podemos elegir x2 y x3 arbitrariamente. Obtenemos un autovector eligiendo x2 = 0 y x3 = 1, y otro eligiendo x2 = 1 y x3 = 0. En ambos casos x1 = −1.
Por lo tanto

son vectores propios linealmente independientes asociados con λ2 = −5, y las soluciones correspondientes de (9.10.4.16) son

Por esto y (9.10.4.17), el Teorema 9.10.4.1 implica que la solución general de (9.10.4.16) es
 ♦
♦
Propiedades geométricas de soluciones cuando n = 2
Ahora consideraremos las propiedades geométricas de las soluciones de un sistema de coeficientes constantes de 2 × 2
 (9.10.4.18)
(9.10.4.18)
Es conveniente pensar en un “plano y1–y2“, donde un punto se identifica por coordenadas rectangulares (y1, y2).
Si  es una solución no constante de (9.10.4.18), entonces el punto (y1(t), y2(t)) se mueve a lo largo de una curva C en el plano y1–y2 cuando t varía de −∞ a ∞. Llamamos a C la trayectoria de y. (También decimos que C es una trayectoria del sistema (9.10.4.18).) Es importante notar que C es la trayectoria de infinitas soluciones de (9.10.4.18), ya que, si τ es cualquier número real, entonces y(t − τ) es una solución de (9.10.4.18) (Ejercicio 28(b)), y (y1(t − τ), y2(t − τ)) también se mueve a lo largo de C cuando t varía de −∞ a ∞. Además, el Ejercicio 28(c) implica que trayectorias distintas de (9.10.4.18) no pueden intersecarse, y que dos soluciones y1 e y2 de (9.10.4.18) tienen la misma trayectoria si y solo si y2(t) = y1(t − τ) para algún τ.
es una solución no constante de (9.10.4.18), entonces el punto (y1(t), y2(t)) se mueve a lo largo de una curva C en el plano y1–y2 cuando t varía de −∞ a ∞. Llamamos a C la trayectoria de y. (También decimos que C es una trayectoria del sistema (9.10.4.18).) Es importante notar que C es la trayectoria de infinitas soluciones de (9.10.4.18), ya que, si τ es cualquier número real, entonces y(t − τ) es una solución de (9.10.4.18) (Ejercicio 28(b)), y (y1(t − τ), y2(t − τ)) también se mueve a lo largo de C cuando t varía de −∞ a ∞. Además, el Ejercicio 28(c) implica que trayectorias distintas de (9.10.4.18) no pueden intersecarse, y que dos soluciones y1 e y2 de (9.10.4.18) tienen la misma trayectoria si y solo si y2(t) = y1(t − τ) para algún τ.
Del Ejercicio 28(a), una trayectoria de una solución no trivial de (9.10.4.18) no puede contener (0, 0), que definimos como la trayectoria de la solución trivial y ≡ 0. Más generalmente, si  es una solución constante de (9.10.4.18) (que podría ocurrir si cero es un valor propio de la matriz de (9.10.4.18)), definimos la trayectoria de y como el único punto (k1, k2).
es una solución constante de (9.10.4.18) (que podría ocurrir si cero es un valor propio de la matriz de (9.10.4.18)), definimos la trayectoria de y como el único punto (k1, k2).
Para ser específicos, esta es la pregunta: ¿Cómo se ven las trayectorias y cómo se recorren? En esta sección responderemos a esta pregunta, asumiendo que la matriz

de (9.10.4.18) tiene valores propios reales λ1 y λ2 con vectores propios asociados linealmente independientes x1 y x2. Entonces la solución general de (9.10.4.18) es
 (9.10.4.19)
(9.10.4.19)
Consideraremos otras situaciones en las próximas dos secciones.
Le dejamos a usted (Ejercicio 35) clasificar las trayectorias de (9.10.4.18) si cero es un valor propio de A. Limitaremos nuestra atención aquí al caso donde ambos valores propios son distintos de cero. En este caso la situación más simple es donde λ1 = λ2 ≠ 0, entonces (9.10.4.19) se convierte en
y = (c1x1 + c2x2) eλ1t.
Dado que x1 y x2 son linealmente independientes, un vector x arbitrario se puede escribir como x = c1x1 + c2x2. Por lo tanto, la solución general de (9.10.4.18) se puede escribir como y = xeλ1t donde x es un vector bidimensional arbitrario, y las trayectorias de las soluciones no triviales de (9.10.4.18) son semirrectas que pasan por (pero no incluyen) el origen . La dirección del movimiento se aleja del origen si λ1 > 0 (Figura 9.10.4.1), hacia él si λ1 < 0 (Figura 9.10.4.2). (En estas figuras y las siguientes, una flecha que pasa por un punto indica la dirección del movimiento a lo largo de la trayectoria que pasa por el punto).
|
Figura 9.10.4.1 Trayectorias de un sistema 2×2 con valor propio positivo repetido |
Figura 9.10.4.2 Trayectorias de un sistema 2×2 con valor propio negativo repetido |


Ahora suponga que λ2 > λ1, y sean L1 y L2 líneas que pasan por el origen paralelas a x1 y x2, respectivamente. Por semirrecta de L1 (o L2), nos referimos a cualquiera de los rayos obtenidos al eliminar el origen de L1 (o L2).
Haciendo c2 = 0 en (10.4.19) se obtiene y = c1x1eλ1t. Si c1 ≠ 0, la trayectoria definida por esta solución es una semirrecta de L1. La dirección del movimiento se aleja del origen si λ1 > 0, hacia el origen si λ1 < 0.
De manera similar, la trayectoria de y = c2x2eλ2t con c2 ≠ 0 es una semirrecta de L2.
De ahora en adelante, supondremos que c1 y c2 en (9.10.4.19) son ambos distintos de cero. En este caso, la trayectoria de (9.10.4.19) no puede intersecar L1 o L2, ya que cada punto en estas líneas está en la trayectoria de una solución para la cual c1 = 0 o c2 = 0. (Recuerde: ¡trayectorias distintas no pueden cruzarse!). Por lo tanto, la trayectoria de (9.10.4.19) debe estar completamente en uno de los cuatro sectores abiertos delimitados por L1 y L2, pero no en ningún punto de L1 o L2. Desde el punto inicial (y1(0), y2(0)) definido por
y(0) = c1x1 + c2x2
está en la trayectoria, podemos determinar qué sector contiene la trayectoria a partir de los signos de c1 y c2, como se muestra en la Figura 9.10.4.3.

Figura 9.10.4.3 Cuatro sectores abiertos delimitados por L1 y L2
La dirección de y(t) en (9.10.4.19) es la misma que la de
 (9.10.4.20)
(9.10.4.20)
y de
 (9.10.4.21)
(9.10.4.21)
Como el lado derecho de (9.10.4.20) tiende a c2x2 cuando t → ∞, la trayectoria es asintóticamente paralela a L2 cuando t → ∞. Como el lado derecho de (9.10.4.21) tiende a c1x1 cuando t → −∞, la trayectoria es asintóticamente paralela a L1 cuando t → −∞.
La forma y la dirección del recorrido de la trayectoria de (9.10.4.19) dependen de si λ1 y λ2 son positivos, negativos o de signos opuestos. Ahora analizaremos estos tres casos.
En adelante, ||u|| denotará la longitud del vector u.
Caso 1: λ2 > λ1 > 0
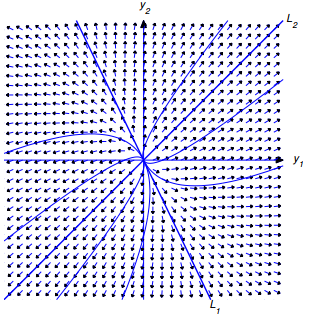
Figura 9.10.4.4 Dos valores propios positivos; movimiento lejos del origen
La Figura 9.10.4.4 muestra algunas trayectorias típicas. En este caso, limt→−∞ ||y(t)|| = 0, por lo que la trayectoria no solo es asintóticamente paralela a L1 cuando t → −∞, sino que en realidad es asintóticamente tangente a L1 en el origen. Por otro lado, limt→∞ ||y(t)|| = ∞ y

entonces, aunque la trayectoria es asintóticamente paralela a L2 cuando t → ∞, no es asintóticamente tangente a L2. La dirección del movimiento a lo largo de cada trayectoria se aleja del origen.
Caso 2: 0 > λ2 > λ1

Figura 9.10.4.5 Dos valores propios negativos; movimiento hacia el origen
La Figura 9.10.4.5 muestra algunas trayectorias típicas. En este caso, limt→∞ ||y(t)|| = 0, por lo que la trayectoria es asintóticamente tangente a L2 en el origen cuando t → ∞. Por otro lado, limt→−∞ ||y(t)|| = ∞ y

entonces, aunque la trayectoria es asintóticamente paralela a L1 cuando t → −∞, no es asintóticamente tangente a ella. La dirección del movimiento a lo largo de cada trayectoria es hacia el origen.
Case 3: λ2 > 0 > λ1

Figura 9.10.4.6 Valores propios de diferentes signos
La Figura 9.10.4.6 muestra algunas trayectorias típicas. En este caso,

entonces la trayectoria es asintóticamente tangente a L2 cuando t → ∞. Similarmente,

entonces la trayectoria es asintóticamente tangente a L1 cuando t → −∞. La dirección del movimiento es hacia el origen en L1 y lejos del origen en L2. La dirección del movimiento a lo largo de cualquier otra trayectoria se aleja de L1, hacia L2.