
| 9. Ecuaciones diferenciales | Ejercicios propuestos para el Capítulo 9.6.1 |
9.6 Aplicaciones de ecuaciones lineales de segundo orden
EN ESTE CAPÍTULO estudiamos aplicaciones de ecuaciones lineales de segundo orden.
Las SECCIONES: Sección 9.6.1 y Sección 9.6.2 tratan sobre sistemas masa-resorte.
La SECCIÓN 9.6.3 trata sobre los circuitos RLC, los análogos eléctricos de los sistemas masa-resorte.
La SECCIÓN 9.6.4 trata sobre el movimiento de un objeto bajo una fuerza central, que es particularmente relevante en la era espacial, ya que, por ejemplo, un satélite que se mueve en órbita sujeto únicamente a la gravedad de la Tierra experimenta movimiento bajo una fuerza central.
9.6.1 PROBLEMAS DE MUELLES I
Consideramos el movimiento de un objeto de masa m, suspendido de un resorte de masa despreciable. Decimos que el sistema masa-resorte está en equilibrio cuando el objeto está en reposo y las fuerzas que actúan sobre él suman cero. La posición del objeto en este caso es la posición de equilibrio. Definimos y como el desplazamiento del objeto desde su posición de equilibrio (Figura 9.6.1.1), medido positivo hacia arriba.
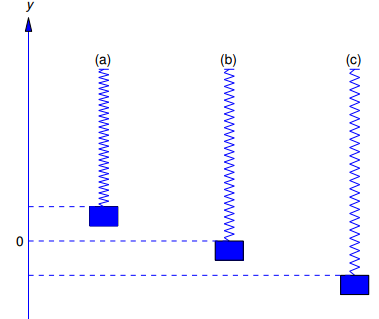
Figura 9.6.1.1 (a) y > 0 (b) y = 0, (c) y < 0
Nuestro modelo da cuenta de los siguientes tipos de fuerzas que actúan sobre el objeto:
• La fuerza −mg, debida a la gravedad.
• Una fuerza Fs ejercida por el resorte que resiste el cambio en su longitud. La longitud natural del resorte es su longitud sin masa adjunta. Suponemos que el resorte obedece la ley de Hooke: si la longitud del resorte cambia en una cantidad ∆L de su longitud natural, entonces el resorte ejerce una fuerza Fs = k∆L, donde k es un número positivo llamado constante del resorte. Si el resorte se estira, entonces ∆L > 0 y Fs > 0, por lo que la fuerza del resorte es hacia arriba, mientras que si el resorte se comprime, entonces ∆L < 0 y Fs < 0, por lo que la fuerza del resorte es hacia abajo.
• Una fuerza de amortiguamiento Fd = −cy′ que resiste el movimiento con una fuerza proporcional a la velocidad del objeto. Puede deberse a la resistencia del aire o a la fricción en el resorte. Sin embargo, una forma conveniente de visualizar una fuerza de amortiguamiento es suponer que el objeto está unido rígidamente a un pistón con masa despreciable sumergido en un cilindro (llamado amortiguador) lleno de un líquido viscoso (Figura 9.6.1.2). A medida que el pistón se mueve, el líquido ejerce una fuerza amortiguadora. Decimos que el movimiento no está amortiguado si c = 0, o amortiguado si c > 0.

Figura 9.6.1.2 Un sistema masa-resorte con amortiguamiento
• Una fuerza externa F, distinta de la fuerza debida a la gravedad, que puede variar con t, pero es independiente del desplazamiento y la velocidad. Decimos que el movimiento es libre si F ≡ 0, o forzado si  .
.
De la segunda ley del movimiento de Newton,
my′′ = −mg + Fd + Fs + F = −mg − cy′ + Fs + F. (9.6.1.1)
Ahora debemos relacionar Fs con y. En ausencia de fuerzas externas, el objeto estira el resorte en una cantidad ∆l para asumir su posición de equilibrio (Figura 9.6.1.3). Dado que la suma de las fuerzas que actúan sobre el objeto es cero, la Ley de Hooke implica que mg = k∆l. Si el objeto se desplaza y unidades desde su posición de equilibrio, el cambio total en la longitud del resorte es ∆L = ∆l − y, por lo que la ley de Hooke implica que
Fs = k∆L = k∆l − ky.
Sustituyendo esto en (9.6.1.1) se obtiene
my′′ = −mg − cy′ + k∆L − ky + F.
Dado que mg = k∆l, esto se puede escribir como
my′′ + cy′ + ky = F. (9.6.1.2)
Lo llamamos la ecuación de movimiento.
Movimiento armónico simple
A lo largo del resto de esta sección, consideraremos los sistemas masa-resorte sin amortiguamiento; es decir, c = 0.
Consideraremos los sistemas con amortiguamiento en la siguiente sección.
Primero consideramos el caso donde el movimiento también es libre; es decir, F = 0. Empezamos con un ejemplo.
Ejemplo ilustrativo 9.6.1.1
Un objeto estira un resorte 6 pulgadas en equilibrio.
(a) Establezca la ecuación de movimiento y encuentre su solución general.
(b) Encuentre el desplazamiento del objeto para t > 0 si se desplaza inicialmente 18 pulgadas por encima del equilibrio y se le da una velocidad hacia abajo de 3 pies/s.
Solución:
(a) Al establecer c = 0 y F = 0 en (9.6.1.2) se obtiene la ecuación de movimiento
my′′ + ky = 0,
Lo que reescribimos como
 (9.6.1.3)
(9.6.1.3)
Aunque necesitaríamos el peso del objeto para obtener k de la ecuación mg = k∆l, podemos obtener k/m solo de ∆l; por tanto, k/m = g/∆l. De acuerdo con las unidades utilizadas en el enunciado del problema, tomamos g = 32 pies/s2. Aunque ∆l se expresa en pulgadas, debemos convertirlo a pies para que sea consistente con esta elección de g; es decir, ∆l = 1/2 pie. Por lo tanto

y (9.6.1.3) se convierte en
y′′ + 64y = 0. (9.6.1.4)
La ecuación característica de (9.6.1.4) es
r2 + 64 = 0,
que tiene los ceros r = ±8i. Por tanto, la solución general de (9.6.1.4) es
y = c1cos8t + c2sen8t. (9.6.1.5)
(b) El desplazamiento ascendente inicial de 18 pulgadas es positivo y debe expresarse en pies. La velocidad descendente inicial es negativa; de este modo,
y(0) = 3/2 y y′(0) = −3.
Diferenciando (9.6.1.5), obtenemos
y′ = −8c1sen8t + 8c2cos8t. (9.6.1.6)
Haciendo t = 0 en (9.6.1.5) y (9.6.1.6) e imponiendo las condiciones iniciales, se muestra que c1 = 3/2 y c2 = −3/8. Por lo tanto

donde y está en pies (Figura 9.6.1.4). ♦
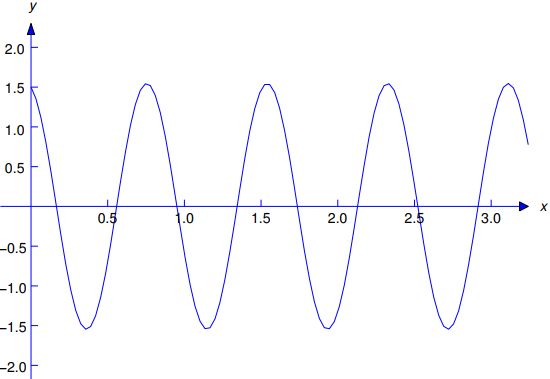
Figura 9.6.1.4
Ahora consideraremos la ecuación
my′′ + ky = 0
donde m y k son números positivos arbitrarios. Dividiendo entre m y definiendo  , se obtiene
, se obtiene
y′′ + ω02y = 0.
La solución general de esta ecuación es
y = c1cosω0t + c2senω0t. (9.6.1.7)
Podemos reescribir esto en una forma más útil definiendo
 (9.6.1.8)
(9.6.1.8)
y
c1 = Rcosφ y c2 = Rsenφ. (9.6.1.9)
Sustituyendo de (9.6.1.9) a (9.6.1.7) y aplicando la identidad
cosω0t cosφ + senω0t senφ = cos(ω0t − φ)
obtenemos
y = Rcos(ω0t − φ). (9.6.1.10)
De (9.6.1.8) y (9.6.1.9) vemos que R y φ pueden interpretarse como coordenadas polares del punto con coordenadas rectangulares (c1, c2) (Figura 9.6.1.5). Dados c1 y c2, podemos calcular R a partir de (9.6.1.8).
De (9.6.1.8) y (9.6.1.9), vemos que φ está relacionado con c1 y c2 por
 y
y 

Figura 9.6.1.5 ; c1 = Rcosφ; c2 = Rsenφ
Hay infinitos ángulos φ, que difieren en múltiplos enteros de 2π, que satisfacen estas ecuaciones. Elegiremos siempre φ de modo que −π ≤ φ < π.
El movimiento descrito por (9.6.1.7) o (9.6.1.10) es un movimiento armónico simple. Vemos a partir de cualquiera de estas ecuaciones que el movimiento es periódico, con período
T = 2π/ω0.
Este es el tiempo requerido para que el objeto complete un ciclo completo de oscilación (por ejemplo, para moverse desde su posición más alta a su posición más baja y de regreso a su posición más alta). Dado que las posiciones más alta y más baja del objeto son y = R e y = −R, decimos que R es la amplitud de la oscilación. El ángulo φ en (9.6.1.10) es el ángulo de fase. Se mide en radianes. La ecuación (9.6.1.10) es la forma amplitud-fase del desplazamiento. Si t está en segundos, entonces ω0 está en radianes por segundo (rad/s); es la frecuencia del movimiento. También se le llama frecuencia natural del sistema resorte-masa sin amortiguamiento.
Ejemplo ilustrativo 9.6.1.2
Encontramos que el desplazamiento del objeto en el Ejemplo 9.6.1.1 es

Encuentre la frecuencia, el período, la amplitud y el ángulo de fase del movimiento.
Solución:
La frecuencia es ω0 = 8 rad/s, y el período es T = 2π/ω0 = π/4 s. Como c1 = 3/2 y c2 = −3/8, la amplitud es

El ángulo de fase está determinado por
 (9.6.1.11)
(9.6.1.11)
y
 (9.6.1.12)
(9.6.1.12)
Usando una calculadora, vemos de (9.6.1.11) que
φ ≈ ±0.245 rad.
Como sen φ < 0 (ver (9.6.1.12)), aquí se aplica el signo menos; esto es,
φ ≈ −0,245 rad. ♦
Ejemplo ilustrativo 9.6.1.3
La longitud natural de un resorte es de 1 m. Se le une un objeto y la longitud del resorte aumenta a 102 cm cuando el objeto está en equilibrio. Luego, el objeto se desplaza inicialmente hacia abajo 1 cm y se le da una velocidad hacia arriba de 14 cm/s. Encuentre el desplazamiento para t > 0. Además, encuentre la frecuencia natural, el período, la amplitud y el ángulo de fase del movimiento resultante. Exprese las respuestas en unidades cgs.
Solución:
En unidades cgs g = 980 cm/s2. Como ∆l = 2 cm, ω02 = g/∆l = 490. Por lo tanto
y′′ + 490y = 0, y(0) = −1, y′(0) = 14.
La solución general de la ecuación diferencial es
y = c1cos7√10t + c2 sen7√10t,
entonces

Sustituyendo las condiciones iniciales en las dos últimas ecuaciones se obtiene c1 = −1 y c2 = 2/√10. Por eso,

La frecuencia es 7√10 rad/s y el período es T = 2π/(7√10) s. la amplitud es

El ángulo de fase está determinado por

Por lo tanto φ está en el segundo cuadrante y
 ♦
♦
Oscilación forzada no amortiguada
En muchos problemas mecánicos, un dispositivo está sujeto a fuerzas externas periódicas. Por ejemplo, los soldados que marchan en cadencia sobre un puente provocan perturbaciones periódicas en el puente, y los motores de un avión propulsado por hélice provocan perturbaciones periódicas en sus alas. En ausencia de suficientes fuerzas de amortiguamiento, tales perturbaciones, incluso si son de pequeña magnitud, pueden causar fallas estructurales si se encuentran en ciertas frecuencias críticas. Para ilustrar esto, consideraremos el movimiento de un objeto en un sistema masa-resorte sin amortiguamiento, sujeto a una fuerza externa
F(t) = F0 cosωt
donde F0 es una constante. En este caso, la ecuación de movimiento (9.6.1.2) es
my′′ + ky = F0 cosωt,
Lo que reescribimos como
 (9.6.1.13)
(9.6.1.13)
con ω0 = √(k/m). Veremos en los siguientes dos ejemplos que las soluciones de (9.6.1.13) con  se comportan de manera muy diferente a las soluciones con ω = ω0.
se comportan de manera muy diferente a las soluciones con ω = ω0.
Ejemplo ilustrativo 9.6.1.4
Resolver el problema de valor inicial
 (9.6.1.14)
(9.6.1.14)
dado que .
Solución:
Primero obtenemos una solución particular de (9.6.1.13) por el método de coeficientes indeterminados. Como , cosωt no es una solución de la ecuación complementaria
y′′ + ω02y = 0.
Por lo tanto (9.6.1.13) tiene una solución particular de la forma
yp = Acosωt + Bsenωt.
ya que
si y solo si

Esto se cumple si y solo si
 y B = 0
y B = 0
entonces
La solución general de (9.6.1.13) es
 (9.6.1.15)
(9.6.1.15)
por lo que

Las condiciones iniciales y(0) = 0 y y′(0) = 0 en (9.6.1.14) implican que
 y c2 = 0.
y c2 = 0.
Sustituyendo estos en (9.6.1.15), se obtiene
 (9.6.1.16)
(9.6.1.16)
Es revelador escribir esto de otra forma. Empezamos con las identidades trigonométricas

Restando la segunda identidad de la primera se obtiene
cos(α − β) − cos(α + β) = 2senα senβ (9.6.1.17)
Ahora, sea
α − β = ωt y α + β = ω0t, (9.6.1.18)
de modo que
 y
y  (9.6.1.19)
(9.6.1.19)
Sustituyendo (9.6.1.18) y (9.6.1.19) en (9.6.1.17) se obtiene

y sustituyendo esto en (9.6.1.16) se obtiene
 (9.6.1.20)
(9.6.1.20)
donde
 (9.6.1.21)
(9.6.1.21)
De (9.6.1.20) podemos considerar y como una variación sinusoidal con frecuencia (ω0 +ω)/2 y amplitud variable |R(t)|. En la Figura 9.6.1.6, la curva discontinua sobre el eje t es y = |R(t)|, la curva discontinua debajo del eje t es y = −|R(t)|, y el desplazamiento y aparece como una oscilación limitada por a ellos. La oscilación de y para t en un intervalo entre ceros sucesivos de R(t) se llama latido. ♦

Figura 9.6.1.6 Oscilación no amortiguada con latidos
Puedes ver en (9.6.1.20) y (9.6.1.21) que
además, si ω + ω0 es suficientemente grande en comparación con ω − ω0, entonces |y| asume valores cercanos a (quizás iguales a) este límite superior durante cada tiempo. Sin embargo, la oscilación permanece acotada para todo t. (Esto supone que el resorte puede resistir desviaciones de este tamaño y seguir obedeciendo la ley de Hooke). El siguiente ejemplo muestra que esto no es así si ω = ω0.
Ejemplo ilustrativo 9.6.1.5
Encuentre la solución general de
 (9.6.1.22)
(9.6.1.22)
Solución:
Primero obtenemos una solución particular yp de (9.6.1.22). Como cosω0t es una solución de la ecuación complementaria, la forma de yp es
yp = t(Acosω0t + Bsenω0t). (9.6.1.23)
Entonces
yp′ = Acosω0t + Bsenω0t + ω0t(−Asenω0t + Bcosω0t)
y
yp′′ = 2ω0(−Asenω0t + Bcosω0t) − ω02t(Acosω0t + Bsenω0t). (9.6.1.24)
De (9.6.1.23) y (9.6.1.24), vemos que yp satisface (9.6.1.22) si

es decir, si
A = 0 y 
Por lo tanto

es una solución particular de (9.6.1.22). La solución general de (9.6.1.22) es

La gráfica de yp se muestra en la Figura 9.6.1.7, donde se puede ver que yp oscila entre las líneas discontinuas
 y
y 
con amplitud creciente que tiende a ∞ cuando t → ∞. Por supuesto, esto significa que el resorte eventualmente dejará de obedecer la ley de Hooke o se romperá. ♦

Figura 9.6.1.7 Desplazamiento ilimitado por resonancia
Este fenómeno de desplazamientos ilimitados de un sistema masa-resorte en respuesta a una función forzada periódica en su frecuencia natural se llama resonancia. Las estructuras mecánicas más complicadas también pueden exhibir fenómenos similares a la resonancia. Por ejemplo, las oscilaciones rítmicas de un puente colgante por las fuerzas del viento o del ala de un avión por las vibraciones periódicas de los motores alternativos pueden causar daños o incluso fallas si las frecuencias de las perturbaciones están cerca de las frecuencias críticas determinadas por los parámetros del sistema mecánico en cuestión. .
Donde puedo comprobar mis respuestas y verificar procedimientos