
| 9. Ecuaciones diferenciales | 9.10. Sistemas lineales de ecuaciones diferenciales | 9.10.6 Sistemas homogéneos con coeficientes constantes III |
Ejercicios propuestos para la Sección 9.10.6
En los Ejercicios 1–16 encuentre la solución general.



En los Ejercicios 17–24 resuelve el problema de valor inicial.


25. Suponga que una matriz A de n × n con entradas reales tiene un valor propio complejo λ = α + iβ (β ≠ 0) con un vector propio asociado x = u + iv, donde u y v tienen componentes reales. Demuestre que u y v son distintos de cero.
y1 = eαt(u cosβt − v senβt) y y2 = eαt(u senβt + v cosβt),
son las partes real e imaginaria de
eαt(cosβt + isenβt)(u + iv).
27. Muestre que si los vectores u y v no son ambos 0 y β ≠ 0 entonces las funciones vectoriales
y1 = eαt(u cosβt − v senβt) y y2 = eαt(u senβt + v cosβt)
son linealmente independientes en cada intervalo. AYUDA: Hay dos casos a considerar: (i) {u, v} linealmente independiente y (ii) {u, v} linealmente dependiente. En cualquier caso, aproveche la independencia lineal de {cosβt, senβt} en cada intervalo.
28. Suponga que  y
y  no son ortogonales; es decir, (u, v) ≠ 0.
no son ortogonales; es decir, (u, v) ≠ 0.
(a) Demuestre que la ecuación cuadrática

tiene raíz positiva k1 y raíz negativa k2 = −1/k1.
(b) Sean u1(1) = u − k1v, v1(1) = v + k1u, u1(2) = u − k2v, y v1(2) = v + k2u, de modo que (u1(1) , v1(1)) = (u1(2) , v1(2)) = 0, de la discusión anterior. Muestre que
 y
y 
(c) Sean U1, V1, U2 y V2 vectores unitarios en las direcciones de u1(1), v1(1), u1(2) y v1(2), respectivamente. Concluya de (a) que U2 = V1 y V2 = −U1 y que, por lo tanto, los ángulos en sentido antihorario desde U1 a V1 y desde U2 a V2 son ambos π/2 o ambos −π/2.
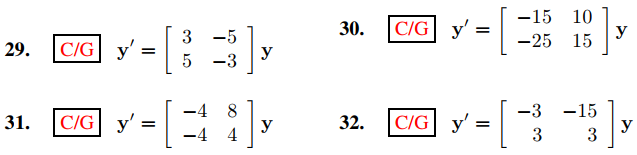
En los ejercicios 29 a 32, encuentre los vectores U y V paralelos a los ejes de simetría de las trayectorias y grafique algunas trayectorias típicas.
En los ejercicios 33 a 40, encuentre los vectores U y V paralelos a los ejes de simetría de las trayectorias de las sombras y trace una trayectoria típica.


9.10.7 Variación de parámetros para sistemas lineales no homogéneos »