
| 10. Cálculo vectorial – Vectores en el espacio | Ejercicios propuestos para el Capítulo 10.17 |
10.17 Integrales de Superficie
Objetivos de aprendizaje:
10.17.1 Encontrar las representaciones paramétricas de un cilindro, un cono y una esfera.
10.17.2 Describir la integral de superficie de una función escalar sobre una superficie paramétrica.
10.17.3 Usar una integral de superficie para calcular el área de una superficie dada.
10.17.4 Explicar el significado de una superficie orientada, dando un ejemplo.
10.17.5 Describir la integral de superficie de un campo vectorial.
10.17.6 Usar integrales de superficie para resolver problemas aplicados.
Hemos visto que una integral de línea es una integral sobre un camino en un plano o en el espacio. Sin embargo, si deseamos integrar sobre una superficie (un objeto bidimensional) en lugar de un camino (un objeto unidimensional) en el espacio, entonces necesitamos un nuevo tipo de integral que pueda manejar la integración sobre objetos en dimensiones superiores. Podemos extender el concepto de una integral de línea a una integral de superficie para permitirnos realizar esta integración.
Las integrales de superficie son importantes por las mismas razones que las integrales de línea son importantes. Tienen muchas aplicaciones en física e ingeniería, y nos permiten desarrollar versiones de dimensiones superiores del Teorema Fundamental del Cálculo. En particular, las integrales de superficie nos permiten generalizar el teorema de Green a dimensiones superiores, y aparecen en algunos teoremas importantes que discutimos en secciones posteriores.
Superficies Paramétricas
Una integral de superficie es similar a una integral de línea, excepto que la integración se realiza sobre una superficie en lugar de un camino. En este sentido, las integrales de superficie amplían nuestro estudio de las integrales de línea. Al igual que con las integrales de línea, hay dos tipos de integrales de superficie: una integral de superficie de una función escalar y una integral de superficie de un campo vectorial.
Sin embargo, antes de que podamos integrar sobre una superficie, necesitamos considerar la superficie misma. Recuerde que para calcular una integral de línea escalar o vectorial sobre la curva C, primero necesitamos parametrizar C. De manera similar, para calcular una integral de superficie sobre la superficie S, necesitamos parametrizar S. Es decir, necesitamos un concepto funcional de una superficie parametrizada (o una superficie paramétrica), de la misma manera que ya tenemos un concepto de una curva parametrizada.
Una superficie parametrizada está dada por una descripción de la forma
\[ \mathbf{r}(u, v) = \langle x(u, v), y(u, v), z(u, v) \rangle. \]Observe que esta parametrización involucra dos parámetros, u y v, porque una superficie es bidimensional y, por lo tanto, se necesitan dos variables para trazar la superficie. Los parámetros u y v varían sobre una región llamada dominio de parámetros, o espacio de parámetros: el conjunto de puntos en el plano uv que se pueden sustituir en r. Cada elección de u y v en el dominio de parámetros da un punto en la superficie, del mismo modo que cada elección de un parámetro t da un punto en una curva parametrizada. Toda la superficie se crea haciendo todas las elecciones posibles de u y v sobre el dominio de parámetros.
Definición 10.17.1
Dada una parametrización de una superficie \( \mathbf{r}(u, v) = \langle x(u, v), y(u, v), z(u, v) \rangle \), el dominio de la parametrización es el conjunto de puntos en el plano \( uv \) que pueden ser sustituidos en \( \mathbf{r} \). ♦
Ejemplo ilustrativo 10.17.1: Parametrizando un Cilindro
Describe la superficie \( S \) parametrizada por
\[ \mathbf{r}(u, v) = \langle \cos u, \sin u, v \rangle, \quad -\infty < u < \infty, \quad -\infty < v < \infty. \]Solución:
Para tener una idea de la forma de la superficie, primero graficamos algunos puntos. Dado que el dominio del parámetro es todo \( \mathbb{R}^2 \), podemos elegir cualquier valor para \( u \) y \( v \) y graficar el punto correspondiente. Si \( u = v = 0 \), entonces
\[ \mathbf{r}(0, 0) = (1, 0, 0), \text{ por lo que el punto } (1, 0, 0) \text{ está en } \mathcal{S}. \text{ De manera similar, los puntos } \mathbf{r}(\pi, 2) = (-1, 0, 2) \text{ y } \mathbf{r} \left( \frac{\pi}{2}, 4 \right) = (0, 1, 4) \text{ están en } \mathcal{S}. \]Aunque graficar puntos puede darnos una idea de la forma de la superficie, generalmente necesitamos bastantes puntos para ver la forma. Dado que es tedioso graficar docenas o cientos de puntos, usamos otra estrategia. Para visualizar \( \mathcal{S} \), visualizamos dos familias de curvas que se encuentran en \( \mathcal{S} \). En la primera familia de curvas mantenemos \( u \) constante; en la segunda familia de curvas mantenemos \( v \) constante. Esto nos permite construir un “esqueleto” de la superficie, obteniendo así una idea de su forma.
Primero, supongamos que \( u \) es una constante \( K \). Entonces, la curva trazada por la parametrización es \( (\cos K, \sin K, v) \), lo que da una línea vertical que pasa por el punto \( (\cos K, \sin K, v) \) en el plano \( xy \).
Ahora supongamos que \( v \) es una constante \( K \). Entonces, la curva trazada por la parametrización es \( (\cos u, \sin u, K) \), lo que da un círculo en el plano \( z = K \) con radio 1 y centro en \( (0, 0, K) \).
Si \( u \) se mantiene constante, obtenemos líneas verticales; si \( v \) se mantiene constante, obtenemos círculos de radio 1 centrados alrededor de la línea vertical que pasa por el origen. Por lo tanto, la superficie trazada por la parametrización es el cilindro \( x^2 + y^2 = 1 \) (Figura 10.17.1).
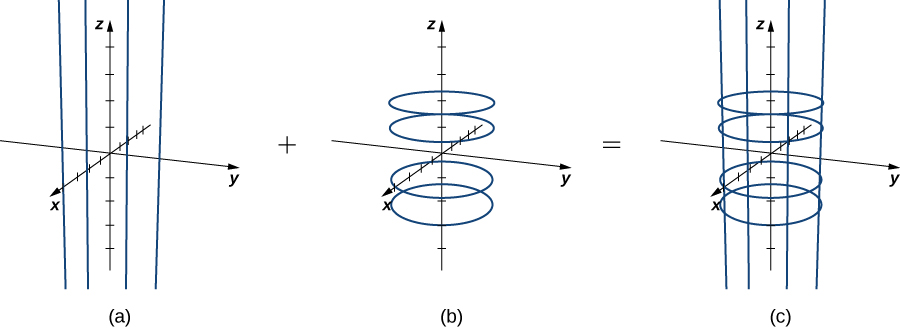
Figura 10.17.1
(a) Líneas \((\cos K, \sin K, v)\) para \(K = 0, \frac{\pi}{2}, \pi\), y \(\frac{3\pi}{2}\).
(b) Círculos \((\cos u, \sin u, K)\) para \(K = -2, -1, 1\), y 2.
(c) Las líneas y círculos juntos. A medida que \(u\) y \(v\) varían, describen un cilindro.
Observa que si \( x = \cos u \) y \( y = \sin u \), entonces \( x^2 + y^2 = 1 \), por lo que los puntos de \( S \) efectivamente se encuentran en el cilindro. Por el contrario, cada punto en el cilindro está contenido en algún círculo \( (\cos u, \sin u, k) \) para algún \( k \), y por lo tanto, cada punto en el cilindro está contenido en la superficie parametrizada (Figura 10.17.2).
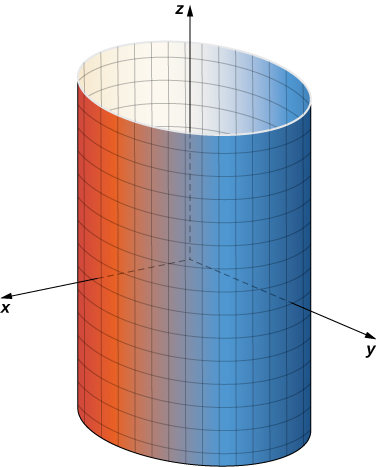
Figura 10.17.2 Cilindro \( x^2 + y^2 = r^2 \) tiene la parametrización \( \mathbf{r}(u, v) = (r \cos u, r \sin u, v), \, 0 \leq u \leq 2\pi, \, -\infty < v < \infty \).
Análisis:
Observa que si cambiamos el dominio del parámetro, podríamos obtener una superficie diferente. Por ejemplo, si restringimos el dominio a \( 0 \leq u \leq \pi, 0 < v < 6 \), entonces la superficie sería un medio cilindro de altura 6. ♦
Se deduce del Ejemplo 10.17.1 que podemos parametrizar todos los cilindros de la forma \(x^2 + y^2 = R^2\). Si \(S\) es un cilindro dado por la ecuación \(x^2 + y^2 = R^2\), entonces una parametrización de \(S\) es
\[ \mathbf{r}(u, v) = \langle R \cos u, R \sin u, v \rangle, \, 0 \leq u < 2\pi, \, -\infty < v < \infty. \]También podemos encontrar diferentes tipos de superficies dadas sus parametrizaciones, o podemos encontrar una parametrización cuando se nos da una superficie.
Ejemplo ilustrativo 10.17.2: Describiendo una Superficie
Describe la superficie \( S \) parametrizada por
\[ \mathbf{r}(u, v) = \langle u \cos v, u \sin v, u^2 \rangle, \quad 0 \leq u < \infty, \quad 0 \leq v < 2\pi. \]Solución:
Observa que si \( u \) se mantiene constante, entonces la curva resultante es un círculo de radio \( u \) en el plano \( z = u^2 \). Por lo tanto, a medida que \( u \) aumenta, el radio del círculo resultante aumenta. Si \( v \) se mantiene constante, entonces la curva resultante es una parábola vertical. Por lo tanto, esperamos que la superficie sea un paraboloide elíptico. Para confirmar esto, observa que
\[ x^2 + y^2 = (u \cos v)^2 + (u \sin v)^2 \\ = u^2 \cos^2 v + u^2 \sin^2 v \\ = u^2 \\ = z. \]Por lo tanto, la superficie es el paraboloide elíptico \( x^2 + y^2 = z \) (Figura 10.17.3).
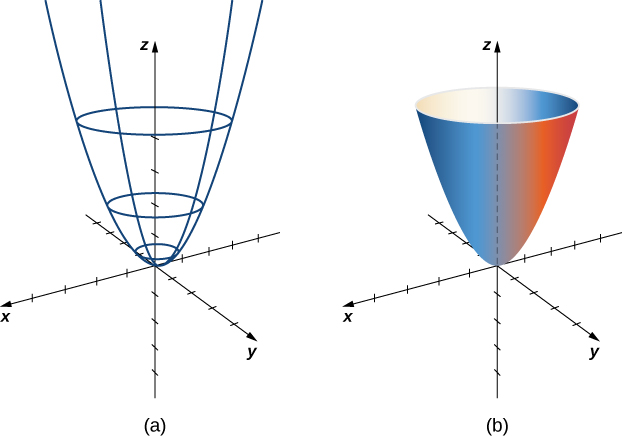
Figura 10.17.3 (a) Los círculos surgen al mantener u constante; las parábolas verticales surgen al mantener v constante. (b) Un paraboloide elíptico resulta de todas las elecciones de u y v en el dominio de parámetros. ♦
Ejercicio de control 10.17.1
Describe la superficie parametrizada por
\[ \mathbf{r}(u, v) = \langle u \cos v, u \sin v, u \rangle, \quad -\infty < u < \infty, \quad 0 \leq v < 2\pi. \]♦
Ejemplo ilustrativo 10.17.3: Encontrando una Parametrización
Da una parametrización del cono \( x^2 + y^2 = z^2 \) que se encuentra sobre o por encima del plano \( z = -2 \).
Solución:
La sección transversal horizontal del cono a la altura \( z = u \) es el círculo \( x^2 + y^2 = u^2 \). Por lo tanto, un punto en el cono a la altura \( u \) tiene coordenadas \( (u \cos v, u \sin v, u) \) para el ángulo \( v \). Por consiguiente, una parametrización del cono es \( \mathbf{r}(u, v) = \langle u \cos v, u \sin v, u \rangle \). Como no nos interesa todo el cono, sino solo la porción sobre o por encima del plano \( z = -2 \), el dominio del parámetro está dado por \(-2 \leq u < \infty, 0 \leq v < 2\pi \) (Figura 10.17.4).
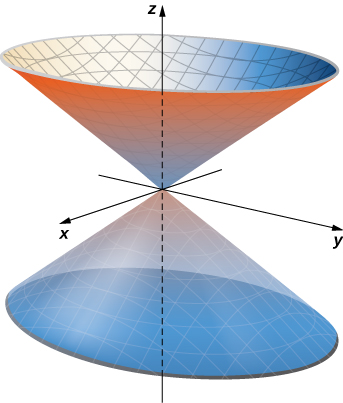
Figura 10.17.4 Cono \( x^2 + y^2 = z^2 \) tiene la parametrización \( \mathbf{r}(u, v) = \langle u \cos v, u \sin v, u \rangle, -\infty < u < \infty, 0 \leq v \leq 2\pi \). ♦
Ejercicio de control 10.17.2
Da una parametrización para la porción del cono \( x^2 + y^2 = z^2 \) que se encuentra en el primer octante. ♦
Hemos discutido parametrizaciones de varias superficies, pero dos tipos importantes de superficies necesitan una discusión aparte: esferas y gráficas de funciones de dos variables. Para parametrizar una esfera, es más fácil usar coordenadas esféricas. La esfera de radio \(\rho\) centrada en el origen está dada por la parametrización
\[ \mathbf{r}(\phi, \theta) = \langle \rho \cos \theta \sin \phi, \rho \sin \theta \sin \phi, \rho \cos \phi \rangle, \quad 0 \leq \theta \leq 2\pi, \quad 0 \leq \phi \leq \pi. \]La idea de esta parametrización es que, a medida que \(\phi\) barre hacia abajo desde el eje \(z\) positivo, se traza un círculo de radio \(\rho \sin \phi\) al dejar que \(\theta\) varíe de \(0\) a \(2\pi\). Para ver esto, fijemos \(\phi\). Entonces,
\[ \begin{align*} x^2 + y^2 &= (\rho \cos \theta \sin \phi)^2 + (\rho \sin \theta \sin \phi)^2 \\ &= \rho^2 \sin^2 \phi \left( \cos^2 \theta + \sin^2 \theta \right) \\ &= \rho^2 \sin^2 \phi \\ &= (\rho \sin \phi)^2. \end{align*} \]Esto resulta en el círculo deseado (Figura10.17.5).
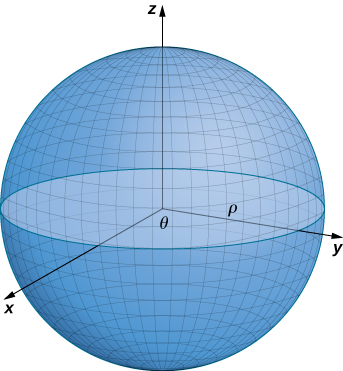
Figura 10.17.5 La esfera de radio \(\rho\) tiene la parametrización \(\mathbf{r}(\phi, \theta) = \langle \rho \cos \theta \sin \phi, \rho \sin \theta \sin \phi, \rho \cos \phi \rangle, \quad 0 \leq \theta \leq 2\pi, \, 0 \leq \phi \leq \pi\).
Finalmente, para parametrizar la gráfica de una función de dos variables, primero dejamos que \( z = f(x, y) \) sea una función de dos variables. La parametrización más simple de la gráfica de \( f \) es \( \mathbf{r}(x, y) = \langle x, y, f(x, y) \rangle \), donde \( x \) y \( y \) varían sobre el dominio de \( f \) (Figura 10.17.6). Por ejemplo, la gráfica de \( f(x, y) = x^2y \) puede parametrizarse mediante \( \mathbf{r}(x, y) = \langle x, y, x^2y \rangle \), donde los parámetros \( x \) y \( y \) varían sobre el dominio de \( f \). Si solo nos interesa una parte de la gráfica de \( f \)—digamos, la parte de la gráfica sobre el rectángulo \([1, 3] \times [2, 5]\)—entonces podemos restringir el dominio del parámetro para obtener esta parte de la superficie:
\[ \mathbf{r}(x, y) = \langle x, y, x^2y \rangle, \quad 1 \leq x \leq 3, \quad 2 \leq y \leq 5. \]De manera similar, si \( S \) es una superficie dada por la ecuación \( x = g(y, z) \) o la ecuación \( y = h(x, z) \), entonces una parametrización de \( S \) es
\[ \mathbf{r}(y, z) = \langle g(y, z), y, z \rangle \quad \text{o} \quad \mathbf{r}(x, z) = \langle x, h(x, z), z \rangle, \quad \text{respectivamente.} \]Por ejemplo, la gráfica del paraboloide \( 2y = x^2 + z^2 \) puede parametrizarse mediante
\[ \mathbf{r}(x, z) = \langle x, \frac{x^2 + z^2}{2}, z \rangle, \quad 0 \leq x < \infty, \quad 0 \leq z < \infty. \]Observa que no necesitamos variar sobre todo el dominio de \( y \) porque \( x \) y \( z \) están al cuadrado.
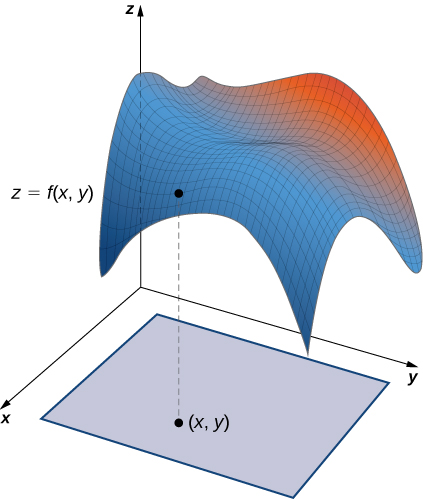
Figura 10.17.6 La parametrización más simple de la gráfica de una función es \( \mathbf{r}(x, y) = \langle x, y, f(x, y) \rangle \).
Ahora generalicemos las nociones de suavidad y regularidad a una superficie paramétrica. Recuerda que la parametrización de una curva \( \mathbf{r}(t), a \leq t \leq b \) es regular si \( \mathbf{r}'(t) \neq 0 \) para todo \( t \) en \([a, b]\). Para una curva, esta condición asegura que la imagen de \( \mathbf{r} \) realmente es una curva y no solo un punto. Por ejemplo, considera la parametrización de la curva
\[ \mathbf{r}(t) = (1, 2), \quad 0 \leq t \leq 5. \]La imagen de esta parametrización es simplemente el punto \((1, 2)\), que no es una curva. Observa también que \( \mathbf{r}'(t) = 0 \). El hecho de que la derivada sea el vector cero indica que en realidad no estamos viendo una curva.
De manera análoga, nos gustaría tener una noción de regularidad para superficies de modo que una parametrización de una superficie realmente trace una superficie. Para motivar la definición de regularidad de una parametrización de superficie, considera la parametrización
\[ \mathbf{r}(u, v) = \langle 0, \cos v, 1 \rangle, \quad 0 \leq u \leq 1, \quad 0 \leq v \leq \pi. \]Aunque esta parametrización parece ser la parametrización de una superficie, observa que la imagen es en realidad una línea (Figura 10.17.7). ¿Cómo podríamos evitar parametrizaciones como esta? ¿Parametrizaciones que no dan una superficie real? Observa que \( \mathbf{r}_u = \langle 0, 0, 0 \rangle \) y \( \mathbf{r}_v = \langle 0, -\sin v, 0 \rangle \), y el producto cruz correspondiente es cero. La analogía de la condición \( \mathbf{r}'(t) = 0 \) es que \( \mathbf{r}_u \times \mathbf{r}_v \) no sea cero para ningún punto \((u, v)\) en el dominio del parámetro, lo cual es una parametrización regular.
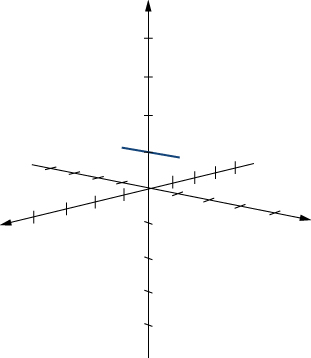
Figura 10.17.7 La imagen de la parametrización \( \mathbf{r}(u, v) = \langle 0, \cos v, 1 \rangle, 0 \leq u \leq 1, 0 \leq v \leq \pi \) es una línea.
Definición 10.17.2
La parametrización \( \mathbf{r}(u, v) = \langle x(u, v), y(u, v), z(u, v) \rangle \) es una parametrización regular si \( \mathbf{r}_u \times \mathbf{r}_v \) no es cero para ningún punto \((u, v)\) en el dominio del parámetro. ♦
Si la parametrización \( \mathbf{r} \) es regular, entonces la imagen de \( \mathbf{r} \) es un objeto bidimensional, como debería ser una superficie. A lo largo de este capítulo, se asume que las parametrizaciones \( \mathbf{r}(u, v) = \langle x(u, v), y(u, v), z(u, v) \rangle \) son regulares.
Recuerda que la parametrización de una curva \( \mathbf{r}(t), a \leq t \leq b \) es suave si \( \mathbf{r}'(t) \) es continua y \( \mathbf{r}'(t) \neq 0 \) para todo \( t \) en \([a, b]\). Informalmente, una parametrización de curva es suave si la curva resultante no tiene esquinas afiladas. La definición de una parametrización de superficie suave es similar. Informalmente, una parametrización de superficie es suave si la superficie resultante no tiene esquinas afiladas.
Definición 10.17.3
Una parametrización de superficie \( \mathbf{r}(u, v) = \langle x(u, v), y(u, v), z(u, v) \rangle \) es suave si el vector \( \mathbf{r}_u \times \mathbf{r}_v \) no es cero para ninguna elección de \( u \) y \( v \) en el dominio del parámetro. ♦
Una superficie también puede ser suave a trozos si tiene caras suaves pero también tiene ubicaciones donde las derivadas direccionales no existen.
Ejemplo ilustrativo 10.17.4: Identificando Superficies Suaves y No Suaves
¿Cuál de las figuras en la Figura 10.17.8 es suave?
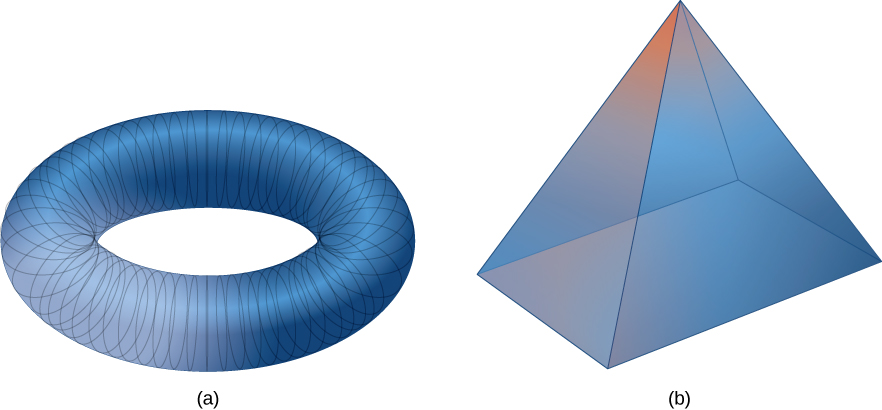
Figura 10.17.8(a) Esta superficie es suave. (b) Esta superficie es suave a trozos.
Solución:
La superficie en la Figura 10.17.8(a) puede parametrizarse mediante
\[ \mathbf{r}(u, v) = \langle (2 + \cos v)\cos u, (2 + \cos v)\sin u, \sin v \rangle, \quad 0 \leq u < 2\pi, \quad 0 \leq v < 2\pi \](podemos usar tecnología para verificarlo). Observa que los vectores
\[ \mathbf{r}_u = \langle -(2 + \cos v)\sin u, (2 + \cos v)\cos u, 0 \rangle \quad \text{y} \quad \mathbf{r}_v = \langle -\sin v \cos u, -\sin v \sin u, \cos v \rangle \]existen para cualquier elección de \( u \) y \( v \) en el dominio del parámetro, y
\[ \mathbf{r}_u \times \mathbf{r}_v = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ -(2 + \cos v)\sin u & (2 + \cos v)\cos u & 0 \\ -\sin v \cos u & -\sin v \sin u & \cos v \end{vmatrix} \] \[ = [(2 + \cos v)\cos u \cos v]\mathbf{i} + [(2 + \cos v)\sin u \cos v]\mathbf{j} \] \[ + \left[(2 + \cos v)\sin v \sin^2 u + (2 + \cos v)\sin v \cos^2 u\right]\mathbf{k} \] \[ = [(2 + \cos v)\cos u \cos v]\mathbf{i} + [(2 + \cos v)\sin u \cos v]\mathbf{j} + [(2 + \cos v)\sin v]\mathbf{k}. \]La componente \( \mathbf{k} \) de este vector es cero solo si \( v = 0 \) o \( v = \pi \). Si \( v = 0 \) o \( v = \pi \), entonces las únicas opciones para \( u \) que hacen que la componente \( \mathbf{j} \) sea cero son \( u = 0 \) o \( u = \pi \). Sin embargo, estas elecciones de \( u \) no hacen que la componente \( \mathbf{i} \) sea cero. Por lo tanto, \( \mathbf{r}_u \times \mathbf{r}_v \) no es cero para ninguna elección de \( u \) y \( v \) en el dominio del parámetro, y la parametrización es suave. Observa que la superficie correspondiente no tiene esquinas afiladas.
En la pirámide de la Figura 10.17.8(b), la nitidez de las esquinas asegura que las derivadas direccionales no existan en esas ubicaciones. Por lo tanto, la pirámide no tiene una parametrización suave. Sin embargo, la pirámide consta de cinco caras suaves, y por lo tanto esta superficie es suave por partes. ♦
Ejercicio de control 10.17.3
¿Es la parametrización de la superficie \( \mathbf{r}(u, v) = \langle u^{2v}, v + 1, \sin u \rangle, \, 0 \leq u \leq 2, \, 0 \leq v \leq 3 \) suave? ♦
Área Superficial de una Superficie Paramétrica
Nuestro objetivo es definir una integral de superficie, y como primer paso hemos examinado cómo parametrizar una superficie. El segundo paso es definir el área de una superficie paramétrica. La notación necesaria para desarrollar esta definición se utiliza en el resto de este capítulo.
Sea \( S \) una superficie con parametrización \( \mathbf{r}(u, v) = \langle x(u, v), y(u, v), z(u, v) \rangle \) sobre algún dominio de parámetros \( D \). Suponemos aquí y en adelante que la parametrización de la superficie \( \mathbf{r}(u, v) = \langle x(u, v), y(u, v), z(u, v) \rangle \) es continuamente diferenciable, es decir, cada función componente tiene derivadas parciales continuas. Supongamos, por simplicidad, que \( D \) es un rectángulo (aunque el siguiente material puede extenderse para manejar dominios de parámetros no rectangulares). Divide el rectángulo \( D \) en subrectángulos \( D_{ij} \) con ancho horizontal \( \Delta u \) y longitud vertical \( \Delta v \). Supongamos que \( i \) varía de 1 a \( m \) y \( j \) varía de 1 a \( n \), de modo que \( D \) se subdivide en \( mn \) rectángulos. Esta división de \( D \) en subrectángulos da lugar a una división correspondiente de la superficie \( S \) en piezas \( S_{ij} \). Elige un punto \( P_{ij} \) en cada pieza \( S_{ij} \). El punto \( P_{ij} \) corresponde al punto \( (u_p, v_p) \) en el dominio del parámetro.
Observa que podemos formar una cuadrícula con líneas paralelas al eje \( u \) y al eje \( v \) en el plano \( uv \). Estas líneas de la cuadrícula corresponden a un conjunto de curvas de la cuadrícula en la superficie \( S \) que está parametrizada por \( \mathbf{r}(u, v) \). Sin pérdida de generalidad, asumimos que \( P_{ij} \) está ubicado en la esquina de dos curvas de la cuadrícula, como en la Figura 10.17.9. Si pensamos en \( \mathbf{r} \) como una aplicación del plano \( uv \) a \( \mathbb{R}^3 \), las curvas de la cuadrícula son la imagen de las líneas de la cuadrícula bajo \( \mathbf{r} \). Para ser precisos, considera las líneas de la cuadrícula que pasan por el punto \( (u_p, v_p) \). Una línea está dada por \( x = u_p, y = v \); la otra está dada por \( x = u, y = v_p \). En la primera línea de la cuadrícula, la componente horizontal se mantiene constante, lo que produce una línea vertical que pasa por \( (u_p, v_p) \). En la segunda línea de la cuadrícula, la componente vertical se mantiene constante, lo que produce una línea horizontal que pasa por \( (u_p, v_p) \). Las curvas de la cuadrícula correspondientes son \( \mathbf{r}(u_p, v) \) y \( \mathbf{r}(u, v_p) \), y estas curvas se intersecan en el punto \( P_{ij} \).
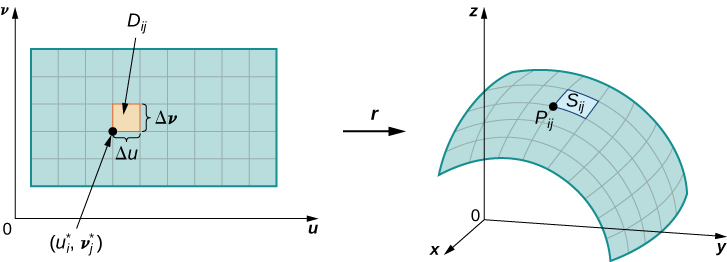
Figura 10.17.9 Las líneas de la cuadrícula en un dominio de parámetros corresponden a curvas de cuadrícula en una superficie.
Ahora considera los vectores que son tangentes a estas curvas de la cuadrícula. Para la curva de la cuadrícula \( \mathbf{r}(u_i, v) \), el vector tangente en \( P_{ij} \) es
\[ \mathbf{t}_v(P_{ij}) = \mathbf{r}_v(u_i, v_j) = \langle x_v(u_i, v_j), y_v(u_i, v_j), z_v(u_i, v_j) \rangle. \]Para la curva de la cuadrícula \( \mathbf{r}(u, v_j) \), el vector tangente en \( P_{ij} \) es
\[ \mathbf{t}_u(P_{ij}) = \mathbf{r}_u(u_i, v_j) = \langle x_u(u_i, v_j), y_u(u_i, v_j), z_u(u_i, v_j) \rangle. \]Si el vector \( \mathbf{N} = \mathbf{t}_u(P_{ij}) \times \mathbf{t}_v(P_{ij}) \) existe y no es cero, entonces el plano tangente en \( P_{ij} \) existe (Figura 10.17.10). Si la pieza \( S_{ij} \) es lo suficientemente pequeña, entonces el plano tangente en el punto \( P_{ij} \) es una buena aproximación de la pieza \( S_{ij} \).
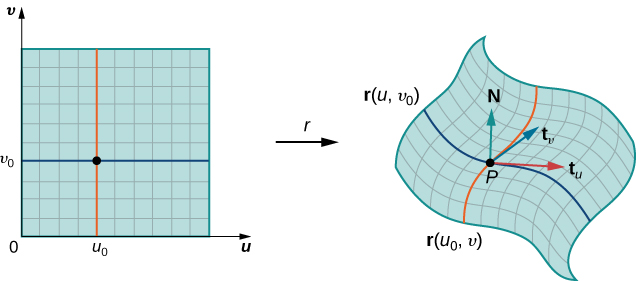
Figura 10.17.10 Si el producto vectorial de los vectores tu y tv existe, entonces hay un plano tangente.
El plano tangente en \( P_{ij} \) contiene los vectores \( \mathbf{t}_u(P_{ij}) \) y \( \mathbf{t}_v(P_{ij}) \), y por lo tanto, el paralelogramo generado por \( \mathbf{t}_u(P_{ij}) \) y \( \mathbf{t}_v(P_{ij}) \) está en el plano tangente. Dado que el rectángulo original en el plano \( uv \) correspondiente a \( S_{ij} \) tiene un ancho \( \Delta u \) y una longitud \( \Delta v \), el paralelogramo que usamos para aproximar \( S_{ij} \) es el generado por \( \Delta u \, \mathbf{t}_u(P_{ij}) \) y \( \Delta v \, \mathbf{t}_v(P_{ij}) \). En otras palabras, escalamos los vectores tangentes por las constantes \( \Delta u \) y \( \Delta v \) para que coincidan con la escala de la división original de rectángulos en el dominio del parámetro. Por lo tanto, el área del paralelogramo utilizado para aproximar el área de \( S_{ij} \) es
\[ \Delta S_{ij} \approx \left\| \left( \Delta u \, \mathbf{t}_u(P_{ij}) \right) \times \left( \Delta v \, \mathbf{t}_v(P_{ij}) \right) \right\| = \left\| \mathbf{t}_u(P_{ij}) \times \mathbf{t}_v(P_{ij}) \right\| \Delta u \Delta v. \]Variando el punto \( P_{ij} \) sobre todas las piezas \( S_{ij} \) y utilizando la aproximación anterior, llegamos a la siguiente definición del área de una superficie paramétrica (Figura 10.17.11).
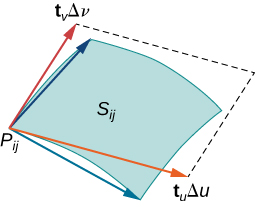
Figura 10.17.11 El paralelogramo generado por \( \mathbf{t}_u \) y \( \mathbf{t}_v \) aproxima la pieza de la superficie \( S_{ij} \).
Definición 10.17.4
Sea \( \mathbf{r}(u, v) = \langle x(u, v), y(u, v), z(u, v) \rangle \) con dominio de parámetro \( D \) una parametrización suave de la superficie \( S \). Además, supongamos que \( S \) se traza solo una vez a medida que \( \langle u, v \rangle \) varía sobre \( D \). El área de la superficie de \( S \) es
\[ \iint_D \left\| \mathbf{t}_u \times \mathbf{t}_v \right\| \, dA, \]donde \( \mathbf{t}_u = \left( \frac{\partial x}{\partial u}, \frac{\partial y}{\partial u}, \frac{\partial z}{\partial u} \right) \) y \( \mathbf{t}_v = \left( \frac{\partial x}{\partial v}, \frac{\partial y}{\partial v}, \frac{\partial z}{\partial v} \right) \), y todas las derivadas parciales son continuas. ♦
Ejemplo ilustrativo 10.17.5: Calculando el Área de una Superficie
Calcula el área de la superficie lateral (el área del “lado”, sin incluir la base) del cono circular recto con altura h y radio r.
Solución:
Antes de calcular el área de la superficie de este cono usando la Ecuación dela Def. 10.17.4, necesitamos una parametrización. Suponemos que este cono está en \(\mathbb{R}^3\) con su vértice en el origen (Figura 10.17.12). Para obtener una parametrización, sea \(\alpha\) el ángulo que se barre comenzando en el eje \(z\) positivo y terminando en el cono, y sea \(k = \tan \alpha\). Para un valor de altura \(v\) con \(0 \leq v \leq h\), el radio del círculo formado por la intersección del cono con el plano \(z = v\) es \(kv\). Por lo tanto, una parametrización de este cono es
\[ \mathbf{s}(u, v) = \langle kv \cos u, kv \sin u, v \rangle, \quad 0 \leq u < 2\pi, \quad 0 \leq v \leq h. \]La idea detrás de esta parametrización es que, para un valor fijo de \(v\), el círculo barrido al variar \(u\) es el círculo a la altura \(v\) y con radio \(kv\). A medida que \(v\) aumenta, la parametrización barre una “pila” de círculos, lo que resulta en el cono deseado.
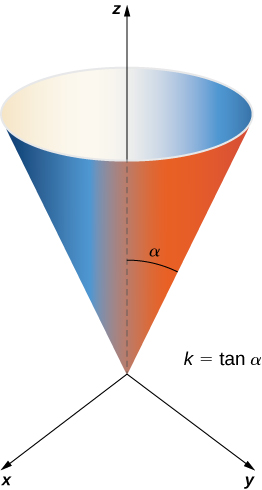
Figura 10.17.12 El cono circular recto con radio \( r = kv \) y altura \( h \) tiene la parametrización
\[ \mathbf{s}(u, v) = \langle kv \cos u, kv \sin u, v \rangle, \quad 0 \leq u < 2\pi, \quad 0 \leq v \leq h. \]Con una parametrización en mano, podemos calcular el área de la superficie del cono usando la Ecuación 10.17.4. Los vectores tangentes son \( \mathbf{t}_u = \langle -kv \sin u, kv \cos u, 0 \rangle \) y \( \mathbf{t}_v = \langle k \cos u, k \sin u, 1 \rangle \). Por lo tanto,
\[ \begin{align*} \mathbf{t}_u \times \mathbf{t}_v &= \left|\begin{array}{ccc} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ -kv \sin u & kv \cos u & 0 \\ k \cos u & k \sin u & 1 \end{array}\right| \\ &= \langle kv \cos u, kv \sin u, -k^2 v \sin^2 u – k^2 v \cos^2 u \rangle \\ &= \langle kv \cos u, kv \sin u, -k^2 v \rangle. \end{align*} \]La magnitud de este vector es
\[ \begin{align*} \left\| \langle kv \cos u, kv \sin u, -k^2 v \rangle \right\| &= \sqrt{k^2 v^2 \cos^2 u + k^2 v^2 \sin^2 u + k^4 v^2} \\ &= \sqrt{k^2 v^2 + k^4 v^2} \\ &= kv \sqrt{1 + k^2}. \end{align*} \]Según la Ecuación 10.17.4, el área de la superficie del cono es
\[ \begin{align*} \iint_D \left\| \mathbf{t}_u \times \mathbf{t}_v \right\| \, dA &= \int_0^h \int_0^{2\pi} kv \sqrt{1 + k^2} \, du \, dv \\ &= 2\pi k \sqrt{1 + k^2} \int_0^h v \, dv \\ &= 2\pi k \sqrt{1 + k^2} \left[ \frac{v^2}{2} \right]_0^h \\ &= \pi k h^2 \sqrt{1 + k^2}. \end{align*} \]Dado que \( k = \tan \alpha = \frac{r}{h} \),
\[ \begin{align*} \pi k h^2 \sqrt{1 + k^2} &= \pi \frac{r}{h} h^2 \sqrt{1 + \frac{r^2}{h^2}} \\ &= \pi r h \sqrt{1 + \frac{r^2}{h^2}} \\ &= \pi r \sqrt{h^2 + r^2}. \end{align*} \]Por lo tanto, el área de la superficie lateral del cono es \( \pi r \sqrt{h^2 + r^2} \).
Análisis:
El área de la superficie de un cono circular recto con radio \( r \) y altura \( h \) generalmente se expresa como \( \pi r^2 + \pi r \sqrt{h^2 + r^2} \).
La razón de esto es que la base circular se incluye como parte del cono, y por lo tanto, el área de la base \( \pi r^2 \) se suma al área de la superficie lateral \( \pi r \sqrt{h^2 + r^2} \) que encontramos. ♦
Ejercicio de control 10.17.4
Encuentra el área de la superficie con la parametrización
\[ \mathbf{r}(u, v) = \langle u + v, u^2, 2v \rangle, \quad 0 \leq u \leq 3, \quad 0 \leq v \leq 2. \]♦
Ejemplo ilustrativo 10.17.6: Calculando el área superficial de la esfera
Demuestra que el área de la superficie de la esfera \( x^2 + y^2 + z^2 = r^2 \) es \( 4\pi r^2 \).
Solución:
La esfera tiene la parametrización
\[ \langle r \cos \theta \sin \phi, r \sin \theta \sin \phi, r \cos \phi \rangle, \quad 0 \leq \theta < 2\pi, \quad 0 \leq \phi \leq \pi. \]Los vectores tangentes son
\[ \mathbf{t}_\theta = \langle -r \sin \theta \sin \phi, r \cos \theta \sin \phi, 0 \rangle \quad \text{y} \quad \mathbf{t}_\phi = \langle r \cos \theta \cos \phi, r \sin \theta \cos \phi, -r \sin \phi \rangle. \]Por lo tanto,
\[ \mathbf{t}_\phi \times \mathbf{t}_\theta = \langle r^2 \cos \theta \sin^2 \phi, r^2 \sin \theta \sin^2 \phi, r^2 \sin^2 \theta \sin \phi \cos \phi + r^2 \cos^2 \theta \sin \phi \cos \phi \rangle \] \[ = \langle r^2 \cos \theta \sin^2 \phi, r^2 \sin \theta \sin^2 \phi, r^2 \sin \phi \cos \phi \rangle. \]Ahora,
\[ \left\| \mathbf{t}_\phi \times \mathbf{t}_\theta \right\| = \sqrt{r^4 \sin^4 \phi \cos^2 \theta + r^4 \sin^4 \phi \sin^2 \theta + r^4 \sin^2 \phi \cos^2 \phi} \] \[ = \sqrt{r^4 \sin^4 \phi + r^4 \sin^2 \phi \cos^2 \phi} \] \[ = r^2 \sqrt{\sin^2 \phi} \] \[ = r^2 \sin \phi. \]Observa que \( \sin \phi \geq 0 \) en el dominio del parámetro porque \( 0 \leq \phi < \pi \), y esto justifica la ecuación \( \sqrt{\sin^2 \phi} = \sin \phi \). El área de la superficie de la esfera es
\[ \int_0^{2\pi} \int_0^{\pi} r^2 \sin \phi \, d\phi \, d\theta = r^2 \int_0^{2\pi} 2 \, d\theta = 4\pi r^2. \]Hemos derivado la fórmula familiar para el área de la superficie de una esfera usando integrales de superficie. ♦
Ejercicio de control 10.17.5
Demuestra que el área de la superficie del cilindro \( x^2 + y^2 = r^2 \), \( 0 \leq z \leq h \) es \( 2\pi rh \). Observa que este cilindro no incluye las tapas superior e inferior. ♦
Además de parametrizar superficies dadas por ecuaciones o formas geométricas estándar como conos y esferas, también podemos parametrizar superficies de revolución. Por lo tanto, podemos calcular el área de la superficie de una superficie de revolución utilizando las mismas técnicas. Sea \( y = f(x) \geq 0 \) una función positiva de una sola variable en el dominio \( a \leq x \leq b \), y sea \( S \) la superficie obtenida al rotar \( f \) alrededor del eje \( x \) (Figura 10.17.13). Sea \( \theta \) el ángulo de rotación. Entonces, \( S \) puede parametrizarse con los parámetros \( x \) y \( \theta \) mediante
\[ \mathbf{r}(x, \theta) = \langle x, f(x) \cos \theta, f(x) \sin \theta \rangle, \quad a \leq x \leq b, \quad 0 \leq \theta < 2\pi. \]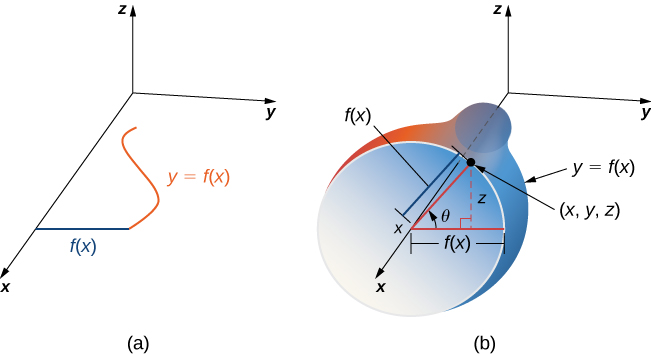
Figura 10.17.13 Podemos parametrizar una superficie de revolución mediante \( \mathbf{r}(x, \theta) = \langle x, f(x) \cos \theta, f(x) \sin \theta \rangle \),
\( a \leq x \leq b, 0 \leq \theta < 2\pi \).
Ejemplo ilustrativo 10.17.7: Calculando el Área Superficial de un Sólido de Revolución
Encuentra el área de la superficie de revolución obtenida al rotar \( y = x^2, 0 \leq x \leq b \) alrededor del eje \( x \) (Figura 10.17.14).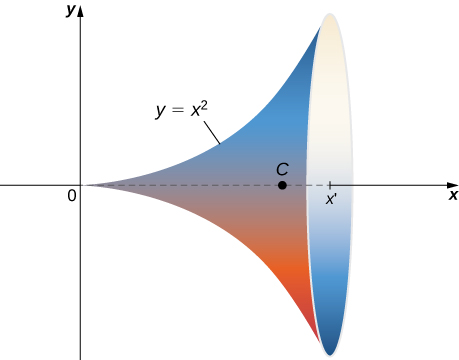
Figura 10.17.14 Se puede utilizar una integral de superficie para calcular el área superficial de este sólido de revolución.
Solución:
Esta superficie tiene la parametrización
\[ \mathbf{r}\left(x,\theta\right)=\left\langle x,x^{2}\cos\theta,x^{2}\sin\theta \right\rangle, \quad 0\leq x\leq b, \quad 0\leq\theta<2\pi. \]Los vectores tangentes son \(\mathbf{t}_{x}=\left\langle 1,2x\cos\theta,2x\sin\theta\right\rangle\) y \(\mathbf{t}_{\theta}=\left\langle 0,-x^{2}\sin\theta,-x^{2}\cos\theta\right\rangle\).
Por lo tanto,
\[ \mathbf{t}_{x} \times \mathbf{t}_{\theta} = \left\langle 2x^{3}\cos^{2}\theta+2x^{3}\sin^{2}\theta,-x^{2}\cos \theta,-x^{2}\sin\theta\right\rangle = \left\langle 2x^{3},-x^{2}\cos\theta,-x^{2}\sin\theta\right\rangle \]y
\[ ||\mathbf{t_{x}} \times \mathbf{t_{\theta}}|| = \sqrt{4x^{6}+x^{4}\cos^{2}\theta+x^{4}\sin^{2}\theta} = \sqrt{4x^{6}+x^{4}} = x^{2}\sqrt{4x^{2}+1}. \]El área de la superficie de revolución es
\begin{align*} \int_{0}^{b}\int_{0}^{\pi}x^{2}\sqrt{4x^{2}+1}d\theta dx &= 2\pi\int_{0}^{b}x^{2}\sqrt{4x^{2}+1}dx \\ &= 2\pi\left[\frac{1}{64}\left(2\sqrt{4x^{2}+1}\left(8x^{3}+x\right)- \sinh^{-1}\left(2x\right)\right)\right]_{0}^{b} \\ &= 2\pi\left[\frac{1}{64}\left(2\sqrt{4b^{2}+1}\left(8b^{3}+b\right)- \sinh^{-1}\left(2b\right)\right)\right]. \end{align*}♦
Ejercicio de control 10.17.6
Usa la Ecuación 6.18 para encontrar el área de la superficie de revolución obtenida al rotar la curva
\[ y = \sin x, \quad 0 \leq x \leq \pi \]alrededor del eje \(x\). ♦
Integral de superficie de una función escalar
Ahora que podemos parametrizar superficies y calcular sus áreas, estamos en condiciones de definir integrales de superficie. Primero, consideremos la integral de superficie de una función escalar. Informalmente, la integral de superficie de una función escalar es análoga a una integral de línea escalar en una dimensión superior. El dominio de integración de una integral de línea escalar es una curva parametrizada (un objeto unidimensional); el dominio de integración de una integral de superficie escalar es una superficie parametrizada (un objeto bidimensional). Por lo tanto, la definición de una integral de superficie sigue muy de cerca la definición de una integral de línea. Para las integrales de línea escalares, dividimos la curva del dominio en trozos pequeños, elegimos un punto en cada trozo, calculamos el valor de la función en ese punto y tomamos el límite de la suma de Riemann correspondiente. Para las integrales de superficie escalares, dividimos la región del dominio (que ya no es una curva) en trozos pequeños y procedemos de la misma manera.
Sea \( S \) una superficie suave por partes con parametrización \( \mathbf{r} (u, v) = \langle x (u, v), y (u, v), z (u, v) \rangle \) con dominio de parámetros \( D \), y sea \( f (x, y, z) \) una función cuyo dominio contiene a \( S \). Por ahora, supongamos que el dominio de parámetros \( D \) es un rectángulo, pero podemos extender la lógica básica de cómo procedemos a cualquier dominio de parámetros (la elección de un rectángulo es simplemente para hacer la notación más manejable). Divide el rectángulo \( D \) en subrectángulos \( D_{ij} \) con ancho horizontal \( \Delta u \) y largo vertical \( \Delta v \). Supongamos que \( i \) varía de 1 a \( m \) y \( j \) varía de 1 a \( n \), de modo que \( D \) se subdivide en \( mn \) rectángulos. Esta división de \( D \) en subrectángulos da lugar a una división correspondiente de \( S \) en piezas \( S_{ij} \). Elige un punto \( P_{ij} \) en cada pieza \( S_{ij} \), evalúa \( P_{ij} \) en \( f \), y multiplica por el área \( \Delta S_{ij} \) para formar la suma de Riemann
\[ \sum_{i=1}^{m} \sum_{j=1}^{n} f (P_{ij}) \Delta S_{ij}. \]Para definir una integral de superficie de una función escalar, dejamos que las áreas de las piezas de \( S \) tiendan a cero tomando un límite.
Definición 10.17.5
La integral de superficie de una función escalar \( f \) sobre una superficie suave por partes \( S \) es
\[ \iint_S f\left( x, y, z \right) dS = \lim_{m,n \to \infty} \sum_{i=1}^m \sum_{j=1}^n f\left( P_{ij} \right) \Delta S_{ij}. \]♦
Nuevamente, observa las similitudes entre esta definición y la definición de una integral de línea escalar. En la definición de una integral de línea, dividimos una curva en trozos, evaluamos una función en un punto de cada trozo y permitimos que la longitud de los trozos tienda a cero tomando el límite de la suma de Riemann correspondiente. En la definición de una integral de superficie, dividimos una superficie en trozos, evaluamos una función en un punto de cada trozo y permitimos que el área de los trozos tienda a cero tomando el límite de la suma de Riemann correspondiente. Por lo tanto, una integral de superficie es similar a una integral de línea, pero en una dimensión superior.
La definición de una integral de línea escalar puede extenderse a dominios de parámetros que no son rectángulos utilizando la misma lógica que antes. La idea básica es dividir el dominio de parámetros en trozos pequeños, elegir un punto de muestra en cada trozo, y así sucesivamente. La forma exacta de cada trozo en el dominio de muestra se vuelve irrelevante a medida que las áreas de los trozos tienden a cero.
Las integrales de superficie de funciones escalares son difíciles de calcular a partir de la definición, al igual que las integrales de línea escalares. Para desarrollar un método que facilite el cálculo de integrales de superficie, aproximamos las áreas de superficie \(\Delta S_{ij}\) con pequeñas piezas de un plano tangente, tal como lo hicimos en la subsección anterior. Recordemos la definición de los vectores \(\mathbf{t}_{u}\) y \(\mathbf{t}_{v}\):
\[ \mathbf{t}_{u}=\left\langle\frac{\partial x}{\partial u},\frac{\partial y}{ \partial u},\frac{\partial z}{\partial u}\right\rangle \quad \text{y} \quad \mathbf{t}_{v}= \left\langle\frac{\partial x}{\partial v},\frac{\partial y}{\partial v}, \frac{\partial z}{\partial v}\right\rangle. \]Del material que ya hemos estudiado, sabemos que
\[ \Delta S_{ij}\approx\left\|\mathbf{t}_{u}\left(P_{ij}\right)\,\times\,\mathbf{t }_{v}\left(P_{ij}\right)\right\|\Delta u\Delta v. \]Por lo tanto,
\[ \iint_{\mathcal{S}}f(x,y,z)d\mathcal{S}\approx\lim_{m,n\to\infty}\sum_{i=1}^{m} \sum_{j=1}^{n}f\left(P_{ij}\right)\left\|\mathbf{t}_{u}\left(P_{ij}\right)\, \times\,\mathbf{t}_{v}\left(P_{ij}\right)\right\|\Delta u\Delta v. \]Esta aproximación se acerca arbitrariamente a \(\lim_{m,n\to\infty}\sum_{i=1}^{m}\sum_{j=1}^{n}f\left(P_{ij}\right)\Delta S_{ij}\) a medida que aumentamos el número de piezas \(S_{ij}\) al dejar que \(m\) y \(n\) tiendan a infinito. Por lo tanto, tenemos la siguiente ecuación para calcular integrales de superficie escalares:
\[ \iint_{\mathcal{S}}f(x,y,z)d\mathcal{S}=\iint_{D}f\left(\mathbf{r}\left(u,v\right )\right)\left\|\mathbf{t}_{u}\,\times\,\mathbf{t}_{v}\right\|dA. \hspace{20pt} \text{(10.17.1)} \]La Ecuación 10.17.1 nos permite calcular una integral de superficie transformándola en una integral doble. Esta ecuación para integrales de superficie es análoga a la Ecuación del Teorema 10.13.1 para integrales de línea:
\[ \int_{C} \boldsymbol{f}(\boldsymbol{x}, \boldsymbol{y}, z) ds = \int_{a}^{b} \boldsymbol{f}\left( \boldsymbol{r}\left(t\right)\right) \|\boldsymbol{r}^{\prime}\left(t\right)\| dt. \]En este caso, el vector \(\boldsymbol{t}_{\boldsymbol{u}} \times \boldsymbol{t}_{\boldsymbol{v}}\) es perpendicular a la superficie, mientras que el vector \(\boldsymbol{r}^{\prime}\left(t\right)\) es tangente a la curva.
Ejemplo ilustrativo 10.17.8: Cálculo de una integral de superficie
Calcula la integral de superficie \(\iint_S \mathbf{5} dS\), donde \(S\) es la superficie con parametrización
\[ \mathbf{r}(u, v) = \langle u, u^2, v \rangle \quad \text{para} \quad 0 \leq u \leq 2 \quad \text{y} \quad 0 \leq v \leq u. \]Solución:
Observa que este dominio de parámetros \( D \) es un triángulo y, por lo tanto, el dominio de parámetros no es rectangular. Esto no es un problema, porque la Ecuación 10.17.1 no impone restricciones sobre la forma del dominio de parámetros.
Para usar la Ecuación 10.17.1 para calcular la integral de superficie, primero encontramos los vectores \( t_u \) y \( t_v \). Nota que \( t_u = \langle 1, 2u, 0 \rangle \) y \( t_v = \langle 0, 0, 1 \rangle \). Por lo tanto,
\[ t_u \times t_v = \begin{vmatrix} i & j & k \\ 1 & 2u & 0 \\ 0 & 0 & 1 \end{vmatrix} = \langle 2u, -1, 0 \rangle \]y
\[ \| t_u \times t_v \| = \sqrt{1 + 4u^2}. \]Por la Ecuación 10.17.1,
\[ \iint_S 5dS = 5 \iint_D \sqrt{1 + 4u^2} dA \] \[ = 5 \int_0^2 \int_0^u \sqrt{1 + 4u^2} dvdu = 5 \int_0^2 u \sqrt{1 + 4u^2} du \] \[ = 5 \left[ \frac{(1+4u^2)^{3/2}}{12} \right]_0^2 = \frac{5(17^{3/2}-1)}{12} \approx 28.79. \]♦
Ejemplo ilustrativo 10.17.9: Cálculo de la integral de superficie de un cilindro
Calcula la integral de superficie \[ \iint_S (x + y^2) \, dS \], donde \( S \) es el cilindro \( x^2 + y^2 = 4, 0 \leq z \leq 3 \) (Figura 10.17.15).
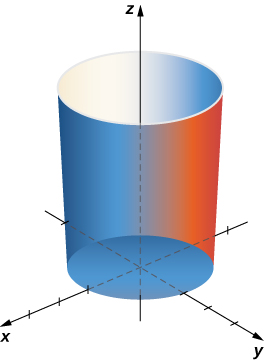
Figura 10.17.15 Integrando la función \( f(x, y, z) = x + y^2 \) sobre un cilindro.
Solución:
Para calcular la integral de superficie, primero necesitamos una parametrización del cilindro. Siguiendo el Ejemplo 10.17.1, una parametrización es
\[ \mathbf{r}\left(u,v\right)=\langle 2\cos u,2\sin u,v\rangle\,, \quad 0 \leq u\leq 2\pi, \quad 0\leq v\leq 3. \]Los vectores tangentes son \(\mathbf{t}_{u}=\left\langle-2\sin u,2\cos u,0\right\rangle\) y \(\mathbf{t}_{v}=\left\langle 0,0,1\right\rangle\). Entonces,
\[ \mathbf{t}_{u}\,\times\,\mathbf{t}_{v}=\begin{vmatrix} \mathbf{i}&\mathbf{j}&\mathbf{k}\\ -2\sin u&2\cos u&0\\ 0&0&1\end{vmatrix}=\langle 2\cos u,2\sin u,0\rangle \]y \(\|\mathbf{t}_{u}\,\times\,\mathbf{t}_{v}\|=\sqrt{4\cos^{2}u+4\sin^{2}u}=2\). Por la Ecuación 10.17.1,
\[ \iint_{S}f(x,y,z)\,dS = \iint_{D}f\left(\mathbf{r}(u,v)\right)\,\|\mathbf{t}_{u}\,\times\,\mathbf{t}_{v}\|\,\,dA \] \[ = \int_{0}^{3}\int_{0}^{2\pi}\left(2\cos u+4\sin^{2}u\right)2\,du\,dv \] \[ = 2\int_{0}^{3}[2\sin u+2u-\sin(2u)]_{0}^{2\pi}dv=2\int_{0}^{3}4\pi\,dv =24\pi. \]♦
Ejercicio de control 10.17.7
Calcula \[ \iint_S (x^2 – z) \, dS \], donde \( S \) es la superficie con parametrización
\[ \mathbf{r}(u, v) = \langle v, u^2 + v^2, 1 \rangle, \quad 0 \leq u \leq 2, \quad 0 \leq v \leq 3. \]♦
Ejemplo ilustrativo 10.17.10: Cálculo de la integral de superficie de una porción de esfera
Calcula la integral de superficie \[ \iint_S f(x, y, z) \, dS \], donde \( f(x, y, z) = z^2 \) y \( S \) es la superficie que consiste en la parte de la esfera \( x^2 + y^2 + z^2 = 4 \) que se encuentra sobre o en el plano \( z = 1 \), y el disco que está encerrado por la intersección del plano \( z = 1 \) y la esfera dada (Figura 10.17.16).
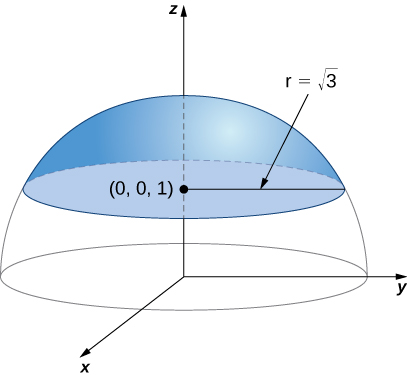
Figura 10.17.16 Cálculo de una integral de superficie sobre la superficie S
Solución:
Observe que S no es suave, sino suave a trozos; S se puede escribir como la unión de su base \(S_1\) y su tapa esférica \(S_2\), y tanto \(S_1\) como \(S_2\) son suaves. Por lo tanto, para calcular \(\iint_S z^2 dS\), escribimos esta integral como \(\iint_{S_1} z^2 dS + \iint_{S_2} z^2 dS\) y calculamos las integrales \(\iint_{S_1} z^2 dS\) y \(\iint_{S_2} z^2 dS\).
Primero, calculamos \(\iint_{S_1} z^2 dS\). Para calcular esta integral, necesitamos una parametrización de \(S_1\). Esta superficie es un disco en el plano \(z = 1\) centrado en (0, 0, 1). Para parametrizar este disco, necesitamos conocer su radio. Dado que el disco se forma donde el plano \(z = 1\) intersecta la esfera \(x^2 + y^2 + z^2 = 4\), podemos sustituir \(z = 1\) en la ecuación \(x^2 + y^2 + z^2 = 4\):
\[ x^2 + y^2 + 1 = 4 \Rightarrow x^2 + y^2 = 3. \]Por lo tanto, el radio del disco es \(\sqrt{3}\) y una parametrización de \(S_1\) es
\[ \mathbf{r}(u, v) = \langle u \cos v, u \sin v, 1 \rangle, 0 \leq u \leq \sqrt{3}, 0 \leq v \leq 2\pi. \]Los vectores tangentes son
\[ \mathbf{t}_u = \langle \cos v, \sin v, 0 \rangle \text{ y } \mathbf{t}_v = \langle -u \sin v, u \cos v, 0 \rangle \text{, y por lo tanto} \] \[ \mathbf{t}_u \times \mathbf{t}_v = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ \cos v & \sin v & 0 \\ -u \sin v & u \cos v & 0 \end{vmatrix} = \langle 0, 0, u \cos^2 v + u \sin^2 v \rangle = \langle 0, 0, u \rangle. \]La magnitud de este vector es \(u\). Por lo tanto,
\[ \begin{aligned} \iint_{S_1} z^2 dS &= \int_{0}^{\sqrt{3}} \int_{0}^{2\pi} f(\mathbf{r}(u, v)) ||\mathbf{t}_u \times \mathbf{t}_v|| \, dv \, du \\ &= \int_{0}^{\sqrt{3}} \int_{0}^{2\pi} u \, dv \, du \\ &= 2\pi \int_{0}^{\sqrt{3}} u \, du \\ &= 3\pi. \end{aligned} \]Ahora calculamos \(\iint_{S_2} dS\). Para calcular esta integral, necesitamos una parametrización de \(S_2\). La parametrización de la esfera completa \(x^2 + y^2 + z^2 = 4\) es
\[ \mathbf{r}(\phi, \theta) = \langle 2 \cos \theta \sin \phi, 2 \sin \theta \sin \phi, 2 \cos \phi \rangle, 0 \leq \theta \leq 2\pi, 0 \leq \phi \leq \pi. \]Dado que solo estamos tomando la parte de la esfera que está en o por encima del plano \(z = 1\), tenemos que restringir el dominio de \(\phi\). Para ver qué tan lejos se extiende este ángulo, observe que el ángulo se puede ubicar en un triángulo rectángulo, como se muestra en la Figura 10.17.17 (el \(\sqrt{3}\) proviene del hecho de que la base de S es un disco con radio \(\sqrt{3}\)). Por lo tanto, la tangente de \(\phi\) es \(\sqrt{3}\), lo que implica que \(\phi\) es \(\pi/6\). Ahora tenemos una parametrización de \(S_2\):
\[ \mathbf{r}(\phi, \theta) = \langle 2 \cos \theta \sin \phi, 2 \sin \theta \sin \phi, 2 \cos \phi \rangle, 0 \leq \theta \leq 2\pi, 0 \leq \phi \leq \pi/3. \]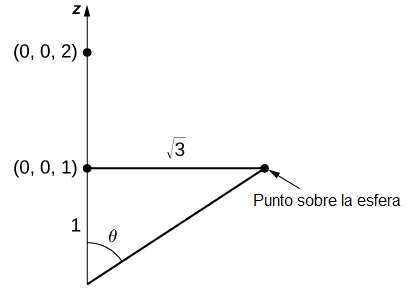
Figura 10.17.17 El valor máximo de \(\phi\) tiene una tangente de \(\sqrt{3}\).
Los vectores tangentes son
\[ \mathbf{t}_\phi = \langle 2 \cos \theta \cos \phi, 2 \sin \theta \cos \phi, -2 \sin \phi \rangle \text{ y } \mathbf{t}_\theta = \langle -2 \sin \theta \sin \phi, 2 \cos \theta \sin \phi, 0 \rangle \text{,} \]y por lo tanto
\[ \mathbf{t}_\phi \times \mathbf{t}_\theta = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ 2 \cos \theta \cos \phi & 2 \sin \theta \cos \phi & -2 \sin \phi \\ -2 \sin \theta \sin \phi & 2 \cos \theta \sin \phi & 0 \end{vmatrix} \] \[ = \langle 4 \cos \theta \sin^2 \phi, 4 \sin \theta \sin^2 \phi, 4 \cos^2 \theta \cos \phi \sin \phi + 4 \sin^2 \theta \cos \phi \sin \phi \rangle \] \[ = \langle 4 \cos \theta \sin^2 \phi, 4 \sin \theta \sin^2 \phi, 4 \cos \phi \sin \phi \rangle. \]La magnitud de este vector es
\[ ||\mathbf{t}_\phi \times \mathbf{t}_\theta|| = \sqrt{16 \cos^2 \theta \sin^4 \phi + 16 \sin^2 \theta \sin^4 \phi + 16 \cos^2 \phi \sin^2 \phi} \] \[ = 4 \sqrt{\sin^4 \phi + \cos^2 \phi \sin^2 \phi}. \]Por lo tanto,
\[ \begin{aligned} \iint_{S_2} z^2 dS &= \int_{0}^{\pi/3} \int_{0}^{2\pi} f(\mathbf{r}(\phi, \theta)) ||\mathbf{t}_\phi \times \mathbf{t}_\theta|| \, d\theta \, d\phi \\ &= \int_{0}^{\pi/3} \int_{0}^{2\pi} 16 \cos^2 \phi \sqrt{\sin^4 \phi + \cos^2 \phi \sin^2 \phi} \, d\theta \, d\phi \\ &= 32\pi \int_{0}^{\pi/3} \cos^2 \phi \sqrt{\sin^4 \phi + \cos^2 \phi \sin^2 \phi} \, d\phi \\ &= 32\pi \int_{0}^{\pi/3} \cos^2 \phi \sin \phi \sqrt{\sin^2 \phi + \cos^2 \phi} \, d\phi \\ &= 32\pi \int_{0}^{\pi/3} \cos^2 \phi \sin \phi \, d\phi \\ &= 32\pi \left[ -\frac{\cos^3 \phi}{3} \right]_{0}^{\pi/3} = 32\pi \left[ \frac{1}{3} – \frac{\sqrt{3}}{8} \right] = \frac{28\pi}{3}. \end{aligned} \]Dado que \(\iint_S z^2 dS = \iint_{S_1} z^2 dS + \iint_{S_2} z^2 dS = 3\pi + \frac{28\pi}{3} = \frac{37\pi}{3}\).
Análisis:
En este ejemplo, descompusimos una integral de superficie sobre una superficie por partes en la suma de integrales de superficie sobre subsuperficies suaves. En este ejemplo solo había dos subsuperficies suaves, pero esta técnica se extiende a un número finito de subsuperficies suaves. ♦
Ejercicio de control 10.17.8
Calculate surface integral \( \iint_S (x – y) \, dS \), where \( S \) is cylinder \( x^2 + y^2 = 1, 0 \leq z \leq 2 \), including the circular top and bottom. ♦
Las integrales de superficie escalares tienen varias aplicaciones en el mundo real. Recordemos que las integrales de línea escalares se pueden utilizar para calcular la masa de un alambre dada su función de densidad. De manera similar, podemos utilizar integrales de superficie escalares para calcular la masa de una lámina dada su función de densidad. Si una lámina delgada de metal tiene la forma de la superficie \(S\) y la densidad de la lámina en el punto \((x, y, z)\) es \(\rho(x, y, z)\), entonces la masa \(m\) de la lámina es \(m = \iint_S \rho(x, y, z) \, dS\).
Ejemplo ilustrativo 10.17.11: Calculando la Masa de una Lámina
Una lámina plana de metal tiene la forma de la superficie \(z = 1 + x + 2y\) que se encuentra sobre el rectángulo \(0 \leq x \leq 4\) y \(0 \leq y \leq 2\). Si la densidad de la lámina está dada por \(\rho(x, y, z) = x^2 y z\), ¿cuál es la masa de la lámina?
Solución:
Sea \(S\) la superficie que describe la lámina. Entonces, la masa de la lámina está dada por
\[ m = \iint_S x^2 y z \, dS. \]Para calcular esta integral de superficie, primero necesitamos una parametrización de \(S\). Dado que \(S\) está dada por la función \(f(x, y) = 1 + x + 2y\), una parametrización de \(S\) es
\[ \mathbf{r}(x, y) = \langle x, y, 1 + x + 2y \rangle, 0 \leq x \leq 4, 0 \leq y \leq 2. \]Los vectores tangentes son \(\mathbf{t}_x = \langle 1, 0, 1 \rangle\) y \(\mathbf{t}_y = \langle 0, 1, 2 \rangle\). Por lo tanto, \(\mathbf{t}_x \times \mathbf{t}_y = \langle -1, -2, 1 \rangle\) y \(||\mathbf{t}_x \times \mathbf{t}_y|| = \sqrt{6}\). Por lo tanto,
\[ \begin{aligned} m &= \iint_S x^2 y z \, dS \\ &= \sqrt{6} \int_{0}^{4} \int_{0}^{2} x^2 y (1 + x + 2y) \, dy \, dx \\ &= \sqrt{6} \int_{0}^{4} \left( \frac{22x^2}{3} + 2x^3 \right) dx \\ &= \frac{2560\sqrt{6}}{9} \approx 696.74. \end{aligned} \]♦
Ejercicio de control 10.17.9
Una pieza de metal tiene una forma que se modela mediante el paraboloide \(z = x^2 + y^2, 0 \leq z \leq 4\), y la densidad del metal está dada por \(\rho(x, y, z) = z + 1\). Encuentra la masa de la pieza de metal. ♦
Orientación de una Superficie
Recordemos que cuando definimos una integral de línea escalar, no necesitábamos preocuparnos por una orientación de la curva de integración. Lo mismo ocurría con las integrales de superficie escalares: no necesitábamos preocuparnos por una “orientación” de la superficie de integración.
Por otro lado, cuando definimos integrales de línea vectorial, la curva de integración necesitaba una orientación. Es decir, necesitábamos la noción de una curva orientada para definir una integral de línea vectorial sin ambigüedad. Del mismo modo, cuando definimos una integral de superficie de un campo vectorial, necesitamos la noción de una superficie orientada. Una superficie orientada se da mediante una orientación “hacia arriba” o “hacia abajo” o, en el caso de superficies como una esfera o un cilindro, una orientación “hacia afuera” o “hacia adentro”.
Sea \(S\) una superficie suave. Para cualquier punto \((x, y, z)\) en \(S\), podemos identificar dos vectores normales unitarios \(\mathbf{N}\) y \(-\mathbf{N}\). Si es posible elegir un vector normal unitario \(\mathbf{N}\) en cada punto \((x, y, z)\) en \(S\) de modo que \(\mathbf{N}\) varíe continuamente sobre \(S\), entonces \(S\) es “orientable”. Tal elección de vector normal unitario en cada punto da la orientación de una superficie \(S\). Si piensas en el campo normal como si describiera el flujo de agua, entonces el lado de la superficie hacia el que fluye el agua es el lado “negativo” y el lado de la superficie desde el que se aleja el agua es el lado “positivo”. Informalmente, una elección de orientación da a \(S\) un lado “externo” y un lado “interno” (o un lado “hacia arriba” y un lado “hacia abajo”), al igual que una elección de orientación de una curva da a la curva direcciones “hacia adelante” y “hacia atrás”.
Las superficies cerradas como las esferas son orientables: si elegimos el vector normal externo en cada punto de la superficie de la esfera, entonces los vectores normales unitarios varían continuamente. Esto se llama la orientación positiva de la superficie cerrada (Figura 10.17.18). También podríamos elegir el vector normal interno en cada punto para dar una orientación “hacia adentro”, que es la orientación negativa de la superficie.
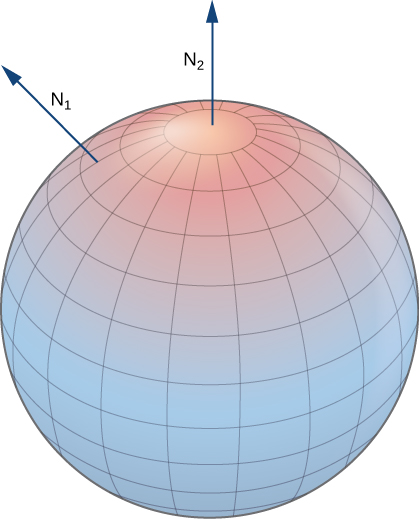
Figura 10.17.18 Una esfera orientada con orientación positiva.
Una porción de la gráfica de cualquier función suave \(z = f(x, y)\) también es orientable. Si elegimos el vector normal unitario que apunta “arriba” de la superficie en cada punto, entonces los vectores normales unitarios varían continuamente sobre la superficie. También podríamos elegir el vector normal unitario que apunta “abajo” de la superficie en cada punto. Para obtener tal orientación, parametrizamos la gráfica de \(f\) de la manera estándar: \(\mathbf{r}(x, y) = \langle x, y, f(x, y) \rangle\), donde \(x\) e \(y\) varían sobre el dominio de \(f\). Entonces, \(\mathbf{t}_x = \langle 1, 0, f_x \rangle\) y \(\mathbf{t}_y = \langle 0, 1, f_y \rangle\), y por lo tanto el producto cruz \(\mathbf{t}_x \times \mathbf{t}_y\) (que es normal a la superficie en cualquier punto de la superficie) es \(\langle -f_x, -f_y, 1 \rangle\). Dado que la componente z de este vector es uno, el vector normal unitario correspondiente apunta “hacia arriba”, y el lado hacia arriba de la superficie se elige para ser el lado “positivo”.
Sea \(S\) una superficie orientable suave con parametrización \(\mathbf{r}(u, v)\). Para cada punto \(\mathbf{r}(a, b)\) en la superficie, los vectores \(\mathbf{t}_u\) y \(\mathbf{t}_v\) se encuentran en el plano tangente en ese punto. El vector \(\mathbf{t}_u \times \mathbf{t}_v\) es normal al plano tangente en \(\mathbf{r}(a, b)\) y por lo tanto es normal a \(S\) en ese punto. Por lo tanto, la elección del vector normal unitario es
\[ \mathbf{N} = \frac{\mathbf{t}_u \times \mathbf{t}_v}{||\mathbf{t}_u \times \mathbf{t}_v||} \]da una orientación de la superficie \(S\).
Ejemplo ilustrativo 10.17.12: Eligiendo una Orientación
Dar una orientación del cilindro \(x^2 + y^2 = r^2, 0 \leq z \leq h\).
Solución:
Esta superficie tiene la parametrización
\[ \mathbf{r}(u, v) = \langle r \cos u, r \sin u, v \rangle, 0 \leq u < 2\pi, 0 \leq v \leq h. \]Los vectores tangentes son \(\mathbf{t}_u = \langle -r \sin u, r \cos u, 0 \rangle\) y \(\mathbf{t}_v = \langle 0, 0, 1 \rangle\). Para obtener una orientación de la superficie, calculamos el vector normal unitario
\[ \mathbf{N} = \frac{\mathbf{t}_u \times \mathbf{t}_v}{||\mathbf{t}_u \times \mathbf{t}_v||}. \]En este caso, \(\mathbf{t}_u \times \mathbf{t}_v = \langle r \cos u, r \sin u, 0 \rangle\) y por lo tanto
\[ ||\mathbf{t}_u \times \mathbf{t}_v|| = \sqrt{r^2 \cos^2 u + r^2 \sin^2 u} = r. \]Una orientación del cilindro es
\[ \mathbf{N}(u, v) = \frac{\langle r \cos u, r \sin u, 0 \rangle}{r} = \langle \cos u, \sin u, 0 \rangle. \]Observa que todos los vectores son paralelos al plano xy, lo cual debería ser el caso con vectores que son normales al cilindro. Además, todos los vectores apuntan hacia afuera, y por lo tanto esta es una orientación hacia afuera del cilindro (Figura 10.17.19).
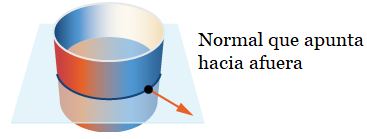
Figura 10.17.19 Si todos los vectores normales a un cilindro apuntan hacia afuera, entonces esta es una orientación hacia afuera del cilindro. ♦
Ejercicio de control 10.17.10
Dar la orientación “hacia arriba” de la gráfica de \(f(x, y) = xy\). ♦
Aquí tienes la traducción al español del texto en el contexto del cálculo vectorial:
Dado que toda curva tiene una dirección “hacia adelante” y “hacia atrás” (o, en el caso de una curva cerrada, una dirección en sentido horario y antihorario), es posible asignar una orientación a cualquier curva. Por lo tanto, se puede considerar cualquier curva como una curva orientada. Sin embargo, esto no ocurre con las superficies. Algunas superficies no pueden orientarse; a estas superficies se les llama no orientables. Esencialmente, una superficie puede orientarse si tiene un lado “interior” y un lado “exterior”, o un lado “superior” y un lado “inferior”. Algunas superficies están retorcidas de tal manera que no hay una noción bien definida de “interior” o “exterior”.
El ejemplo clásico de una superficie no orientable es la cinta de Möbius. Para crear una cinta de Möbius, toma una tira rectangular de papel, dale medio giro y luego une los extremos (Figura 10.17.20). Debido a este medio giro en la tira, la superficie no tiene un lado “exterior” ni “interior”. Si imaginas colocar un vector normal en un punto de la cinta y dejas que el vector recorra toda la banda, entonces (debido al medio giro) los vectores apuntarán en la dirección opuesta cuando regresen a su posición original. Por lo tanto, la cinta realmente solo tiene un lado.

Figura 10.17.20 La construcción de una cinta de Möbius.
Dado que algunas superficies no son orientables, no es posible definir una integral de superficie vectorial en todas las superficies a trozos suaves. Esto contrasta con las integrales de línea vectoriales, que pueden definirse en cualquier curva a trozos suave.
Integral de Superficie de un Campo Vectorial
Con la idea de superficies orientables en mente, ahora estamos listos para definir una integral de superficie de un campo vectorial. La definición es análoga a la definición del flujo de un campo vectorial a lo largo de una curva plana. Recordemos que si F es un campo vectorial bidimensional y \(C\) es una curva plana, entonces la definición del flujo de F a lo largo de \(C\) involucraba cortar \(C\) en trozos pequeños, elegir un punto dentro de cada trozo y calcular \(\mathbf{F} \cdot \mathbf{N}\) en el punto (donde \(\mathbf{N}\) es el vector normal unitario en el punto). La definición de una integral de superficie de un campo vectorial procede de la misma manera, excepto que ahora cortamos la superficie \(S\) en trozos pequeños, elegimos un punto en el trozo pequeño (bidimensional) y calculamos \(\mathbf{F} \cdot \mathbf{N}\) en el punto.
Para colocar esta definición en un entorno del mundo real, sea \(S\) una superficie orientada con vector normal unitario \(\mathbf{N}\). Sea \(\mathbf{v}\) un campo de velocidad de un fluido que fluye a través de \(S\), y supongamos que el fluido tiene densidad \(\rho(x, y, z)\). Imaginemos que el fluido fluye a través de \(S\), pero \(S\) es completamente permeable, de modo que no impide el flujo del fluido (Figura 10.17.21). El flujo másico del fluido es la tasa de flujo de masa por unidad de área. El flujo másico se mide en masa por unidad de tiempo por unidad de área. ¿Cómo podríamos calcular el flujo másico del fluido a través de \(S\)?
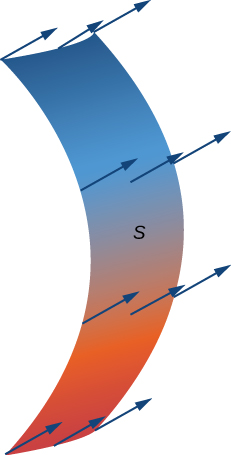
Figura 10.17.21 El fluido fluye a través de una superficie completamente permeable S
La tasa de flujo, medida en masa por unidad de tiempo por unidad de área, es \(\rho \mathbf{v} \cdot \mathbf{N}\). Para calcular el flujo másico a través de \(S\), dividimos \(S\) en pequeñas piezas \(S_{ij}\). Si \(S_{ij}\) es suficientemente pequeña, entonces se puede aproximar mediante un plano tangente en algún punto \(P\) en \(S_{ij}\). Por lo tanto, el vector normal unitario en \(P\) se puede usar para aproximar \(\mathbf{N}(x, y, z)\) en toda la pieza \(S_{ij}\), porque el vector normal a un plano no cambia a medida que nos movemos a través del plano. La componente del vector \(\rho \mathbf{v}\) en \(P\) en la dirección de \(\mathbf{N}\) es \(\rho \mathbf{v} \cdot \mathbf{N}\) en \(P\). Dado que \(S_{ij}\) es pequeña, el producto punto \(\rho \mathbf{v} \cdot \mathbf{N}\) cambia muy poco a medida que variamos a través de \(S_{ij}\), y por lo tanto \(\rho \mathbf{v} \cdot \mathbf{N}\) se puede considerar aproximadamente constante en toda \(S_{ij}\). Para aproximar la masa de fluido por unidad de tiempo que fluye a través de \(S_{ij}\) (y no solo localmente en el punto \(P\)), necesitamos multiplicar \((\rho \mathbf{v} \cdot \mathbf{N})\) (en \(P\)) por el área de \(S_{ij}\). Por lo tanto, la masa de fluido por unidad de tiempo que fluye a través de \(S_{ij}\) en la dirección de \(\mathbf{N}\) se puede aproximar por \((\rho \mathbf{v} \cdot \mathbf{N}) \Delta S_{ij}\), donde \(\mathbf{N}\), \(\rho\) y \(\mathbf{v}\) se evalúan en \(P\) (Figura 10.17.22). Esto es análogo al flujo de un campo vectorial bidimensional \(\mathbf{F}\) a través de la curva plana \(C\), en el que aproximamos el flujo a través de una pequeña pieza de \(C\) con la expresión \((\mathbf{F} \cdot \mathbf{N}) \Delta s\). Para aproximar el flujo másico a través de \(S\), formamos la suma \(\sum_{i=1}^{m} \sum_{j=1}^{n} (\rho \mathbf{v} \cdot \mathbf{N}) \Delta S_{ij}\). A medida que las piezas \(S_{ij}\) se hacen más pequeñas, la suma \(\sum_{i=1}^{m} \sum_{j=1}^{n} (\rho \mathbf{v} \cdot \mathbf{N}) \Delta S_{ij}\) se acerca arbitrariamente al flujo másico. Por lo tanto, el flujo másico es
\[ \iint_S \rho \mathbf{v} \cdot \mathbf{N} \, dS = \lim_{m, n \to \infty} \displaystyle\sum_{i=1}^{m} \displaystyle\sum_{j=1}^{n} (\rho \mathbf{v} \cdot \mathbf{N}) \Delta S_{ij}. \]Esta es una integral de superficie de un campo vectorial. Dejando que el campo vectorial \(\rho \mathbf{v}\) sea un campo vectorial arbitrario \(\mathbf{F}\) conduce a la siguiente definición.
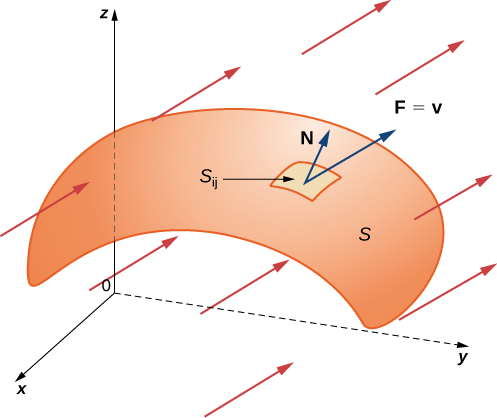
Figura 6.78 La masa de fluido por unidad de tiempo que fluye a través de \(S_{ij}\) en la dirección de \(\mathbf{N}\) puede aproximarse por \(\left(\rho\mathbf{v}\cdot\mathbf{N}\right)\Delta S_{ij}\).
Definición 10.17.6
Sea \( \mathbf{F} \) un campo vectorial continuo con un dominio que contiene una superficie orientada \( S \) con un vector normal unitario \( \mathbf{N} \). La integral de superficie de \( \mathbf{F} \) sobre \( S \) es
\[ \iint_S \mathbf{F} \cdot d\mathbf{S} = \iint_S \mathbf{F} \cdot \mathbf{N} \, dS. \]♦
Observa el paralelismo entre esta definición y la definición de la integral de línea vectorial \(\int_C \mathbf{F} \cdot \mathbf{N} \, ds\). Una integral de superficie de un campo vectorial se define de manera similar a una integral de flujo a través de una curva, excepto que el dominio de integración es una superficie (un objeto bidimensional) en lugar de una curva (un objeto unidimensional). La integral \(\iint_S \mathbf{F} \cdot \mathbf{N} \, dS\) se llama el flujo de \(\mathbf{F}\) a través de \(S\), al igual que la integral \(\int_C \mathbf{F} \cdot \mathbf{N} \, ds\) es el flujo de \(\mathbf{F}\) a través de la curva \(C\). Una integral de superficie sobre un campo vectorial también se llama integral de flujo.
Al igual que con las integrales de línea vectoriales, la integral de superficie \(\iint_S \mathbf{F} \cdot \mathbf{N} \, dS\) es más fácil de calcular después de que la superficie \(S\) ha sido parametrizada. Sea \(\mathbf{r}(u,v)\) una parametrización de \(S\) con dominio de parámetros \(D\). Entonces, el vector normal unitario está dado por \(\mathbf{N} = \frac{\mathbf{t}_u \times \mathbf{t}_v}{\|\mathbf{t}_u \times \mathbf{t}_v\|}\) y, de la Definición 10.17.6, tenemos
\[ \iint_S \mathbf{F} \cdot \mathbf{N} \, dS = \iint_S \mathbf{F} \cdot \mathbf{N} \, dS \] \[ = \iint_S \mathbf{F} \cdot \frac{\mathbf{t}_u \times \mathbf{t}_v}{\|\mathbf{t}_u \times \mathbf{t}_v\|} \, dS \] \[ = \iint_D \left( \mathbf{F} (\mathbf{r}(u,v)) \cdot \frac{\mathbf{t}_u \times \mathbf{t}_v}{\|\mathbf{t}_u \times \mathbf{t}_v\|} \right) \|\mathbf{t}_u \times \mathbf{t}_v\| \, dA \] \[ = \iint_D (\mathbf{F} (\mathbf{r}(u,v)) \cdot (\mathbf{t}_u \times \mathbf{t}_v)) \, dA. \]Por lo tanto, para calcular una integral de superficie sobre un campo vectorial, podemos usar la ecuación
\[ \iint_S \mathbf{F} \cdot \mathbf{N} \, dS = \iint_D (\mathbf{F} (\mathbf{r}(u,v)) \cdot (\mathbf{t}_u \times \mathbf{t}_v)) \, dA. \hspace{20pt} \text{(10.17.2)} \]Ejemplo ilustrativo 10.17.13: Cálculo de una Integral de Superficie
Calcula la integral de superficie \(\iint_S \mathbf{F} \cdot \mathbf{N} \, d\mathbf{S}\), donde \(\mathbf{F} = (-y, x, 0)\) y \(\mathbf{S}\) es la superficie con parametrización \(\mathbf{r}(u, v) = (u, v^2 – u, u + v)\), \(0 \leq u < 3\), \(0 \leq v \leq 4\).
Solución:
Los vectores tangentes son \(\mathbf{t}_{u} = \langle 1, -1, 1 \rangle\) y \(\mathbf{t}_{v} = \langle 0, 2v, 1 \rangle\). Por lo tanto,
\[ \mathbf{t}_{u} \times \mathbf{t}_{v} = \langle -1 – 2v, -1, 2v \rangle. \]Por la Ecuación 10.17.2,
\[ \begin{aligned} \iint_{S} \mathbf{F} \cdot d\mathbf{S} &= \int_{0}^{4} \int_{0}^{3} \mathbf{F} \left( \mathbf{r}(u, v) \right) \cdot \left( \mathbf{t}_{u} \times \mathbf{t}_{v} \right) \, du \, dv \\ &= \int_{0}^{4} \int_{0}^{3} \langle u – v^{2}, u, 0 \rangle \cdot \langle -1 – 2v, -1, 2v \rangle \, du \, dv \\ &= \int_{0}^{4} \int_{0}^{3} \left[ (u – v^{2})(-1 – 2v) – u \right] \, du \, dv \\ &= \int_{0}^{4} \int_{0}^{3} \left( 2v^{3} + v^{2} – 2uv – 2u \right) \, du \, dv \\ &= \int_{0}^{4} \left[ 2v^{3}u + v^{2}u – vu^{2} – u^{2} \right]_{0}^{3} \, dv \\ &= \int_{0}^{4} \left( 6v^{3} + 3v^{2} – 9v – 9 \right) \, dv \\ &= \left[ \frac{3v^{4}}{2} + v^{3} – \frac{9v^{2}}{2} – 9v \right]_{0}^{4} \\ &= 340. \end{aligned} \]Por lo tanto, el flujo de \(\mathbf{F}\) a través de \(S\) es 340. ♦
Ejercicio de control 10.17.11
Calcula la integral de superficie \(\iint_S \mathbf{F} \cdot d\mathbf{S}\), donde \(\mathbf{F} = \langle 0, -z, y \rangle\) y \(S\) es la porción de la esfera unitaria en el primer octante con orientación hacia afuera. ♦
Ejemplo ilustrativo 10.17.14: Cálculo de la Tasa de Flujo de Masa
Sea \( \mathbf{v}(x, y, z) = \langle 2x, 2y, z \rangle \) un campo de velocidad (con unidades de metros por segundo) de un fluido con densidad constante de 80 kg/m\(^3\). Sea \( S \) el hemisferio \( x^2 + y^2 + z^2 = 9 \) con \( z \geq 0 \) de modo que \( S \) esté orientado hacia afuera. Encuentra la tasa de flujo de masa del fluido a través de \( S \).
Saludos:
Una parametrización de la superficie es
\[ \mathbf{r}(\phi, \theta) = \langle 3 \cos\theta \sin\phi, 3 \sin\theta \sin\phi, 3 \cos\phi \rangle, \quad 0 \leq \theta \leq 2\pi, \quad 0 \leq \phi \leq \pi/2. \]Como en el Ejemplo 10.17.7, los vectores tangentes son
\[ \mathbf{t}_{\theta} = \langle -3 \sin\theta \sin\phi, 3 \cos\theta \sin\phi, 0 \rangle \quad \text{y} \quad \mathbf{t}_{\phi} = \langle 3 \cos\theta \cos\phi, 3 \sin\theta \cos\phi, -3 \sin\phi \rangle, \]y su producto cruz es
\[ \mathbf{t}_{\phi} \times \mathbf{t}_{\theta} = \langle 9 \cos\theta \sin^2\phi, 9 \sin\theta \sin^2\phi, 9 \sin\phi \cos\phi \rangle. \]Observa que cada componente del producto cruz es positivo y, por lo tanto, este vector da la orientación hacia afuera. Por lo tanto, usamos la orientación
\[ \mathbf{N} = \langle 9 \cos\theta \sin^2\phi, 9 \sin\theta \sin^2\phi, 9 \sin\phi \cos\phi \rangle \]para la esfera.
Por 10.17.2,
\[ \begin{aligned} \iint_{S} \rho \mathbf{v} \cdot d\mathbf{S} &= 80 \int_{0}^{2\pi} \int_{0}^{\pi/2} \mathbf{v} \left( \mathbf{r} (\phi, \theta) \right) \cdot \left( \mathbf{t}_{\phi} \times \mathbf{t}_{\theta} \right) d\phi \, d\theta \\ &= 80 \int_{0}^{2\pi} \int_{0}^{\pi/2} \langle 6 \cos\theta \sin\phi, 6 \sin\theta \sin\phi, 3 \cos\phi \rangle \cdot \langle 9 \cos\theta \sin^2\phi, 9 \sin\theta \sin^2\phi, 9 \sin\phi \cos\phi \rangle d\phi \, d\theta \\ &= 80 \int_{0}^{2\pi} \int_{0}^{\pi/2} 54 \sin^3\phi + 27 \cos^2\phi \sin\phi \, d\phi \, d\theta \\ &= 80 \int_{0}^{2\pi} \int_{0}^{\pi/2} 54 (1 – \cos^2\phi) \sin\phi + 27 \cos^2\phi \sin\phi \, d\phi \, d\theta \\ &= 80 \int_{0}^{2\pi} \int_{0}^{\pi/2} 54 \sin\phi – 27 \cos^2\phi \sin\phi \, d\phi \, d\theta \\ &= 80 \int_{0}^{2\pi} \left[ -54 \cos\phi + 9 \cos^3\phi \right]_{0}^{\pi/2} d\theta \\ &= 80 \int_{0}^{2\pi} 45 \, d\theta = 7200\pi. \end{aligned} \]Por lo tanto, la tasa de flujo de masa es \(7200\pi \, \text{kg}/\text{sec}/\text{m}^{2}\). ♦
Ejercicio de control 10.17.12
Sea \(\mathbf{v}(x, y, z) = \langle x^2 + y^2, z, 4y \rangle\) m/seg un campo de velocidad de un fluido con densidad constante \(100 \, \text{kg/m}^3\). Sea \(S\) el medio cilindro \(\mathbf{r}(u, v) = \langle \cos u, \sin u, v \rangle\), \(0 \leq u \leq \pi\), \(0 \leq v \leq 2\) orientado hacia afuera. Calcula el flujo de masa del fluido a través de \(S\). ♦
En el Ejemplo 10.17.14, calculamos el flujo de masa, que es la tasa de flujo de masa por unidad de área. Si queremos encontrar la tasa de flujo (medida en volumen por tiempo) en su lugar, podemos usar la integral de flujo \(\iint_S \mathbf{v} \cdot \mathbf{N} \, dS\), que omite la densidad. Dado que la tasa de flujo de un fluido se mide en volumen por unidad de tiempo, la tasa de flujo no tiene en cuenta la masa. Por lo tanto, tenemos la siguiente caracterización de la tasa de flujo de un fluido con velocidad \(\mathbf{v}\) a través de una superficie \(S\):
\[ \text{Tasa de flujo del fluido a través de } S = \iint_S \mathbf{v} \cdot \mathbf{N} \, dS. \]Para calcular la tasa de flujo del fluido en el Ejemplo 10.17.14, simplemente eliminamos la constante de densidad, lo que da una tasa de flujo de \(90\pi \, \text{m}^3/\text{seg}\).
Tanto el flujo de masa como la tasa de flujo son importantes en física e ingeniería. El flujo de masa mide cuánta masa está fluyendo a través de una superficie; la tasa de flujo mide cuánto volumen de fluido está fluyendo a través de una superficie.
Además de modelar el flujo de fluidos, las integrales de superficie se pueden usar para modelar el flujo de calor. Supongamos que la temperatura en el punto \((x, y, z)\) en un objeto es \(T(x, y, z)\). Entonces, el flujo de calor es un campo vectorial proporcional al gradiente negativo de la temperatura en el objeto. Para ser precisos, el flujo de calor se define como el campo vectorial \(\mathbf{F} = -k\nabla T\), donde la constante \(k\) es la conductividad térmica de la sustancia de la que está hecho el objeto (esta constante se determina experimentalmente). La tasa de flujo de calor a través de la superficie \(S\) en el objeto está dada por la integral de flujo
\[ \iint_S \mathbf{F} \cdot dS = \iint_S -k\nabla T \cdot dS. \]Ejemplo ilustrativo 10.17.15: Cálculo del Flujo de Calor
Un cilindro sólido de hierro fundido está dado por las desigualdades \( x^2 + y^2 \leq 1, \, 1 \leq z \leq 4 \). La temperatura en el punto \((x, y, z)\) en una región que contiene el cilindro es \( T(x, y, z) = (x^2 + y^2) \, z \). Dado que la conductividad térmica del hierro fundido es 55, encuentra el flujo de calor a través de la frontera del sólido si esta frontera está orientada hacia afuera.
Solución:
Sea \( S \) la frontera del objeto. Para encontrar el flujo de calor, necesitamos calcular la integral de flujo
\[ \iint_{S} -k\nabla T \cdot dS. \]Observa que \( S \) no es una superficie suave, sino que es suave por partes, ya que \( S \) es la unión de tres superficies suaves (la parte superior e inferior circular y el lado cilíndrico). Por lo tanto, calculamos tres integrales separadas, una para cada parte suave de \( S \). Antes de calcular cualquier integral, nota que el gradiente de la temperatura es \(\nabla T = \left( 2xz, 2yz, x^2 + y^2 \right) \).
Primero consideramos la parte inferior circular del objeto, que denotamos \( S_1 \). Podemos ver que \( S_1 \) es un círculo de radio 1 centrado en el punto \((0, 0, 1)\), situado en el plano \( z = 1 \). Esta superficie tiene la parametrización
\[ \mathbf{r}(u, v) = \langle v \cos u, v \sin u, 1 \rangle, \quad 0 \leq u < 2\pi, \quad 0 \leq v \leq 1. \]Por lo tanto,
\[ \mathbf{t}_u = \langle -v \sin u, v \cos u, 0 \rangle \quad \text{y} \quad \mathbf{t}_v = \langle \cos u, v \sin u, 0 \rangle, \]y
\[ \mathbf{t}_u \times \mathbf{t}_v = \langle 0, 0, -v \sin^2 u – v \cos^2 u \rangle = \langle 0, 0, -v \rangle. \]Dado que la superficie está orientada hacia afuera y \( S_1 \) es la parte inferior del objeto, tiene sentido que este vector apunte hacia abajo. Por la Ecuación 10.17.2, el flujo de calor a través de \( S_1 \) es
\[ \iint_{S_1} -k\nabla T \cdot dS = -55 \int_0^{2\pi} \int_0^1 \nabla T(u, v) \cdot (\mathbf{t}_u \times \mathbf{t}_v) \, dvdu \] \[ = -55 \int_0^{2\pi} \int_0^1 \left( 2v \cos u, 2v \sin u, v^2 \cos^2 u + v^2 \sin^2 u \right) \cdot \langle 0, 0, -v \rangle \, dvdu \] \[ = -55 \int_0^{2\pi} \int_0^1 \left( 2v \cos u, 2v \sin u, v^2 \right) \cdot \langle 0, 0, -v \rangle \, dvdu \] \[ = -55 \int_0^{2\pi} \int_0^1 \left( -v^3 \right) dvdu = -55 \int_0^{2\pi} \left[ -\frac{v^4}{4} \right]_0^1 du = -55 \int_0^{2\pi} -\frac{1}{4} du = \frac{55\pi}{2}. \]Ahora consideremos la parte superior circular del objeto, que denotamos \( S_2 \). Vemos que \( S_2 \) es un círculo de radio 1 centrado en el punto \((0, 0, 4)\), situado en el plano \( z = 4 \). Esta superficie tiene la parametrización
\[ \mathbf{r}(u, v) = \langle v \cos u, v \sin u, 4 \rangle, \quad 0 \leq u < 2\pi, \quad 0 \leq v \leq 1. \]Por lo tanto,
\[ \mathbf{t}_u = \langle -v \sin u, v \cos u, 0 \rangle \quad \text{y} \quad \mathbf{t}_v = \langle \cos u, v \sin u, 0 \rangle, \]y
\[ \mathbf{t}_u \times \mathbf{t}_v = \langle 0, 0, -v \sin^2 u – v \cos^2 u \rangle = \langle 0, 0, -v \rangle. \]Dado que la superficie está orientada hacia afuera y \( S_2 \) es la parte superior del objeto, en su lugar tomamos el vector
\[ \mathbf{t}_v \times \mathbf{t}_u = \langle 0, 0, v \rangle. \]Por la Ecuación 10.17.2, el flujo de calor a través de \( S_2 \) es
\[ \iint_{S_2} -k\nabla T \cdot dS = -55 \int_0^{2\pi} \int_0^1 \nabla T(u, v) \cdot (\mathbf{t}_v \times \mathbf{t}_u) \, dvdu \] \[ = -55 \int_0^{2\pi} \int_0^1 \left( 8v \cos u, 8v \sin u, v^2 \cos^2 u + v^2 \sin^2 u \right) \cdot \langle 0, 0, v \rangle \, dvdu \] \[ = -55 \int_0^{2\pi} \int_0^1 \left( 8v \cos u, 8v \sin u, v^2 \right) \cdot \langle 0, 0, v \rangle \, dvdu \] \[ = -55 \int_0^{2\pi} \int_0^1 \left( v^3 \right) dvdu = -55 \int_0^{2\pi} \left[ \frac{v^4}{4} \right]_0^1 du = -55 \int_0^{2\pi} \frac{1}{4} du = -\frac{55\pi}{2}. \]Finalmente, consideremos el lado cilíndrico del objeto. Esta superficie tiene la parametrización
\[ \mathbf{r}(u, v) = \langle \cos u, \sin u, v \rangle, \quad 0 \leq u < 2\pi, \quad 1 \leq v \leq 4. \]Por el Ejemplo 10.17.9, sabemos que
\[ \mathbf{t}_u \times \mathbf{t}_v = \langle \cos u, \sin u, 0 \rangle. \]Por la Ecuación 10.17.2,
\[ \iint_{S_3} -k\nabla T \cdot dS = -55 \int_0^{2\pi} \int_1^4 \nabla T(u, v) \cdot (\mathbf{t}_u \times \mathbf{t}_v) \, dvdu \] \[ = -55 \int_0^{2\pi} \int_1^4 \left( 2v \cos u, 2v \sin u, \cos^2 u + \sin^2 u \right) \cdot \langle \cos u, \sin u, 0 \rangle \, dvdu \] \[ = -55 \int_0^{2\pi} \int_1^4 \left( 2v \cos u, 2v \sin u, 1 \right) \cdot \langle \cos u, \sin u, 0 \rangle \, dvdu \] \[ = -55 \int_0^{2\pi} \int_1^4 \left( 2v \cos^2 u + 2v \sin^2 u \right) \, dvdu \] \[ = -55 \int_0^{2\pi} \int_1^4 2v \, dvdu = -55 \int_0^{2\pi} \left[ v^2 \right]_1^4 du = -55 \int_0^{2\pi} (16 – 1) du = -55 \int_0^{2\pi} 15 du = -1650\pi. \]Por lo tanto, la tasa de flujo de calor a través de \( S \) es
\[ \frac{55\pi}{2} – \frac{55\pi}{2} – 1650\pi = -1650\pi. \]♦
Ejercicio de control 10.17.13
Una bola sólida de hierro fundido está dada por la desigualdad \( x^2 + y^2 + z^2 \leq 1 \). La temperatura en un punto en una región que contiene la bola es \( T(x, y, z) = \frac{1}{3} (x^2 + y^2 + z^2) \). Encuentra el flujo de calor a través de la frontera del sólido si esta frontera está orientada hacia afuera. ♦