
| 12. Integración múltiple | Ejercicios propuestos para el Capítulo 12.7 |
12.7 Cambio de variables en integrales múltiples
Objetivos de aprendizaje
Recordemos de la Regla de Sustitución el método de integración por sustitución. Al evaluar una integral como \( \int_{2}^{3} x(x^2 – 4)^5 \, dx \), sustituimos \( u = g(x) = x^2 – 4 \). Entonces \( du = 2x \, dx \) o \( x \, dx = \frac{1}{2} du \) y los límites cambian a \( u = g(2) = 2^2 – 4 = 0 \) y \( u = g(3) = 9 – 4 = 5 \). Por lo tanto, la integral se convierte en \( \int_{0}^{5} \frac{1}{2} u^5 \, du \) y esta integral es mucho más sencilla de evaluar. En otras palabras, al resolver problemas de integración, realizamos las sustituciones apropiadas para obtener una integral que sea mucho más simple que la original.
También utilizamos esta idea cuando transformamos integrales dobles de coordenadas rectangulares a coordenadas polares y transformamos integrales triples de coordenadas rectangulares a coordenadas cilíndricas o esféricas para simplificar los cálculos. De manera más general,
donde \( x = g(u) \), \( dx = g'(u) du \), y \( u = c \) y \( u = d \) satisfacen \( c = g^{-1}(a) \) y \( d = g^{-1}(b) \). Un resultado similar ocurre en integrales dobles cuando sustituimos \( x = h(r, \theta) = r \cos \theta \), \( y = g(r, \theta) = r \sin \theta \), y \( dA = dx \, dy = r \, dr \, d\theta \). Entonces obtenemos
donde el dominio \( R \) se reemplaza por el dominio \( S \) en coordenadas polares. Generalmente, la función que utilizamos para cambiar las variables con el fin de simplificar la integración se denomina transformación o mapeo.
Transformaciones Planas
Una transformación plana \( T \) es una función que transforma una región \( G \) en un plano en una región \( R \) en otro plano mediante un cambio de variables. Tanto \( G \) como \( R \) son subconjuntos de \( \mathbb{R}^2 \). Por ejemplo, la Figura 12.7.1 muestra una región \( G \) en el plano \( uv \) transformada en una región \( R \) en el plano \( xy \) mediante el cambio de variables \( x = g(u, v) \) e \( y = h(u, v) \), o a veces escribimos \( x = x(u, v) \) e \( y = y(u, v) \). Típicamente asumiremos que cada una de estas funciones tiene derivadas parciales de primer orden continuas, lo que significa que \( g_u, g_v, h_u \) y \( h_v \) existen y también son continuas. La necesidad de este requisito quedará clara pronto.

Definición
Una transformación \( T: G \to R \), definida como \( T(u, v) = (x, y) \), se dice que es una transformación uno a uno si no hay dos puntos que se mapeen al mismo punto imagen. ♦
Para demostrar que \( T \) es una transformación uno a uno, suponemos que \( T(u_1, v_1) = T(u_2, v_2) \) y demostramos que, como consecuencia, obtenemos \( (u_1, v_1) = (u_2, v_2) \). Si la transformación \( T \) es uno a uno en el dominio \( G \), entonces la inversa \( T^{-1} \) existe con el dominio \( R \), tal que \( T^{-1} \circ T \) y \( T \circ T^{-1} \) son funciones identidad.
La Figura 12.7.1 muestra el mapeo \( T(u, v) = (x, y) \), donde \( x \) e \( y \) están relacionados con \( u \) y \( v \) mediante las ecuaciones \( x = g(u, v) \) e \( y = h(u, v) \). La región \( G \) es el dominio de \( T \) y la región \( R \) es el rango de \( T \), también conocida como la imagen de \( G \) bajo la transformación \( T \).
Ejemplo ilustrativo 12.7.1. Determinación del Funcionamiento de la Transformación
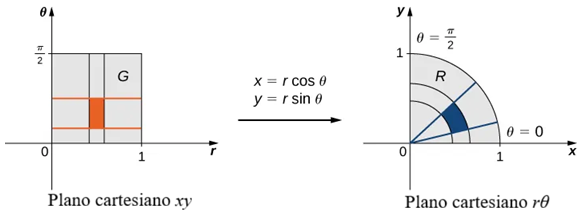
Supongamos que se define una transformación \( T \) como \( T(r, \theta) = (x, y) \), donde \( x = r \cos \theta \) e \( y = r \sin \theta \). Halle la imagen del rectángulo polar \( G = \{ (r, \theta) \mid 0 < r \leq 1, 0 \leq \theta \leq \pi/2 \} \) en el plano \( r\theta \) a una región \( R \) en el plano \( xy \). Demuestre que \( T \) es una transformación uno a uno en \( G \) y halle \( T^{-1}(x, y) \).
Solución:
Como \( r \) varía de 0 a 1 en el plano \( r\theta \), tenemos un disco circular de radio 0 a 1 en el plano \( xy \). Debido a que \( \theta \) varía de 0 a \( \pi/2 \) en el plano \( r\theta \), terminamos obteniendo un cuarto de círculo de radio 1 en el primer cuadrante del plano \( xy \) (Figura 12.7.2). Por lo tanto, \( R \) es un cuarto de círculo limitado por \( x^2 + y^2 = 1 \) en el primer cuadrante.
Para demostrar que \( T \) es una transformación uno a uno, supongamos que \( T(r_1, \theta_1) = T(r_2, \theta_2) \) y demostremos como consecuencia que \( (r_1, \theta_1) = (r_2, \theta_2) \). En este caso, tenemos
Dividiendo, obtenemos
puesto que la función cotangente es una función uno a uno en el intervalo \( 0 \leq \theta \leq \pi/2 \). Además, como \( 0 < r \leq 1 \), tenemos \( r_1 = r_2, \theta_1 = \theta_2 \). Por lo tanto, \( (r_1, \theta_1) = (r_2, \theta_2) \) y \( T \) es una transformación uno a uno de \( G \) en \( R \).
Para hallar \( T^{-1}(x, y) \), despejamos \( r, \theta \) en términos de \( x, y \). Ya sabemos que \( r^2 = x^2 + y^2 \) y \( \tan \theta = \frac{y}{x} \). Por lo tanto, \( T^{-1}(x, y) = (r, \theta) \) se define como \( r = \sqrt{x^2 + y^2} \) y \( \theta = \tan^{-1} \left( \frac{y}{x} \right) \).
♦
Ejemplo ilustrativo 12.7.2. Encontrando la Imagen bajo T
Sea la transformación $T$ definida por $T(u,v)=(x,y)$, donde $x=u^2-v^2$ y $y=uv$. Halle la imagen del triángulo en el plano $uv$ con vértices $(0,0)$, $(0,1)$ y $(1,1)$.
Solución:
El triángulo y su imagen se muestran en la Figura 12.7.3. Para entender cómo se transforman los lados del triángulo, llamemos lado $A$ al que une $(0,0)$ y $(0,1)$, lado $B$ al que une $(0,0)$ y $(1,1)$, y lado $C$ al que une $(1,1)$ y $(0,1)$.
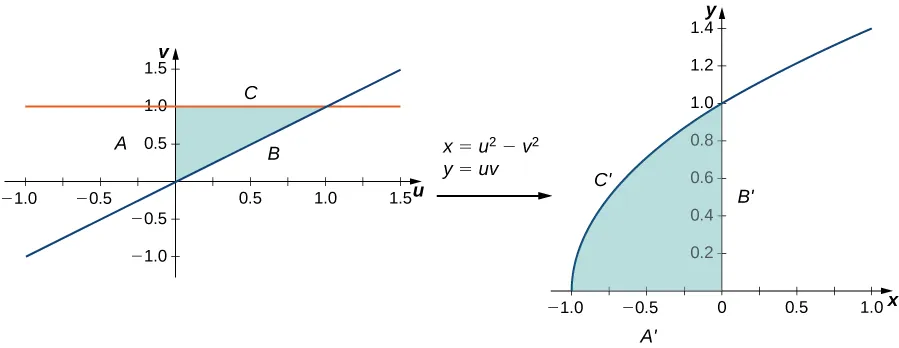
Para el lado \( A \): \( u = 0, 0 \leq v \leq 1 \) se transforma en \( x = -v^2, y = 0 \), por lo que este es el lado \( A’ \) que une \( (-1, 0) \) y \( (0, 0) \).
Para el lado \( B \): \( u = v, 0 \leq u \leq 1 \) se transforma en \( x = 0, y = u^2 \), por lo que este es el lado \( B’ \) que une \( (0, 0) \) y \( (0, 1) \).
Para el lado \( C \): \( 0 \leq u \leq 1, v = 1 \) se transforma en \( x = u^2 – 1, y = u \) (por lo tanto \( x = y^2 – 1 \)), por lo que este es el lado \( C’ \) que forma la mitad superior del arco parabólico que une \( (-1, 0) \) y \( (0, 1) \).
Todos los puntos en la región completa del triángulo en el plano \( uv \) se mapean dentro de la región parabólica en el plano \( xy \). ♦
Ejercicio de control 12.7.1
Sea la transformación $T$ definida por $T(u,v)=(x,y)$, donde $x=u+v$ y $y=3v$. Halle la imagen del rectángulo $G=\{(u,v):0\le u\le 1,\;0\le v\le 2\}$ del plano $uv$ después de la transformación en una región $R$ del plano $xy$. Demuestre que $T$ es una transformación uno a uno y halle $T^{-1}(x,y)$. ♦
Jacobianos
Recordemos que mencionamos cerca del comienzo de esta sección que cada una de las funciones componentes debe tener derivadas parciales primeras continuas, lo que significa que $g_u$, $g_v$, $h_u$ y $h_v$ existen y también son continuas. Una transformación que tiene esta propiedad se llama transformación $C^1$ (aquí $C$ denota continuidad). Sea $T(u,v)=(g(u,v),h(u,v))$, donde $x=g(u,v)$ y $y=h(u,v)$, una transformación $C^1$ uno a uno. Queremos ver cómo transforma una pequeña región rectangular $S$, de $\Delta u$ unidades por $\Delta v$ unidades, en el plano $uv$ (véase la siguiente figura).
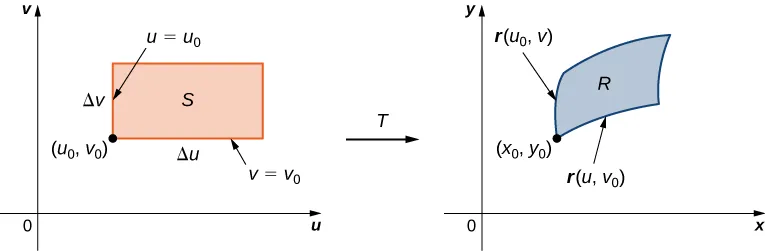
Como \( x = g(u, v) \) e \( y = h(u, v) \), tenemos el vector de posición \( \mathbf{r}(u, v) = g(u, v)\mathbf{i} + h(u, v)\mathbf{j} \) de la imagen del punto \( (u, v) \). Supongamos que \( (u_0, v_0) \) es la coordenada del punto en la esquina inferior izquierda que se mapea a \( (x_0, y_0) = T(u_0, v_0) \). La línea \( v = v_0 \) se mapea a la curva imagen con la función vectorial \( \mathbf{r}(u, v_0) \), y el vector tangente en \( (x_0, y_0) \) a la curva imagen es
De manera similar, la línea \( u = u_0 \) se mapea a la curva imagen con la función vectorial \( \mathbf{r}(u_0, v) \), y el vector tangente en \( (x_0, y_0) \) a la curva imagen es
Ahora, observe que
De manera similar,
Esto nos permite estimar el área \( \Delta A \) de la imagen \( R \) hallando el área del paralelogramo formado por los lados \( \Delta v \mathbf{r}_v \) y \( \Delta u \mathbf{r}_u \). Al usar el producto cruz de estos dos vectores añadiendo la componente \( \mathbf{k} \) como 0, el área \( \Delta A \) de la imagen \( R \) (consulte El Producto Cruz ) es aproximadamente \( \|\Delta u \mathbf{r}_u \times \Delta v \mathbf{r}_v\| = \|\mathbf{r}_u \times \mathbf{r}_v\|\Delta u \Delta v \). En forma de determinante, el producto cruz es
Como \( \|\mathbf{k}\| = 1 \), tenemos \( \Delta A \approx \|\mathbf{r}_u \times \mathbf{r}_v\|\Delta u \Delta v = \left( \frac{\partial x}{\partial u} \frac{\partial y}{\partial v} – \frac{\partial x}{\partial v} \frac{\partial y}{\partial u} \right) \Delta u \Delta v. \).
Definición
El Jacobiano de la transformación \( C^1 \), \( T(u, v) = (g(u, v), h(u, v)) \), se denota por \( J(u, v) \) y se define mediante el determinante de \( 2 \times 2 \)
♦
Utilizando la definición, tenemos
Observe que el Jacobiano se denota frecuentemente de forma simplificada por
Observe también que
Por lo tanto, la notación \( J(u, v) = \frac{\partial(x, y)}{\partial(u, v)} \) sugiere que podemos escribir el determinante Jacobiano con las parciales de \( x \) en la primera fila y las parciales de \( y \) en la segunda fila.
Ejemplo ilustrativo 12.7.3. Encontrando el Jacobiano
Halle el jacobiano de la transformación dada en el Ejemplo 12.7.1.
Solución:
La transformación en el ejemplo es \( T(r, \theta) = (r \cos \theta, r \sin \theta) \) donde \( x = r \cos \theta \) e \( y = r \sin \theta \). Por lo tanto, el Jacobiano es
♦
Ejemplo ilustrativo 12.7.4. Encontrando el Jacobiano
Halle el jacobiano de la transformación dada en el Ejemplo 12.7.2.
Solución:
La transformación en el ejemplo es \( T(u, v) = (u^2 – v^2, uv) \) donde \( x = u^2 – v^2 \) e \( y = uv \). Por lo tanto, el Jacobiano es
♦
Ejercicio de control 12.7.2
Halle el jacobiano de la transformación dada en el punto de control anterior: $T(u,v)=(u+v,2v)$. ♦
Cambio de Variables para Integrales Dobles
Ya hemos visto que, bajo el cambio de variables \( T(u, v) = (x, y) \) donde \( x = g(u, v) \) e \( y = h(u, v) \), una pequeña región \( \Delta A \) en el plano \( xy \) está relacionada con el área formada por el producto \( \Delta u \Delta v \) en el plano \( uv \) mediante la aproximación
Ahora regresemos por un momento a la definición de integral doble:
Haciendo referencia a la Figura 12.7.5, observe que dividimos la región \( S \) en el plano \( uv \) en pequeños subrectángulos \( S_{ij} \) y permitimos que los subrectángulos \( R_{ij} \) en el plano \( xy \) sean las imágenes de \( S_{ij} \) bajo la transformación \( T(u, v) = (x, y) \).
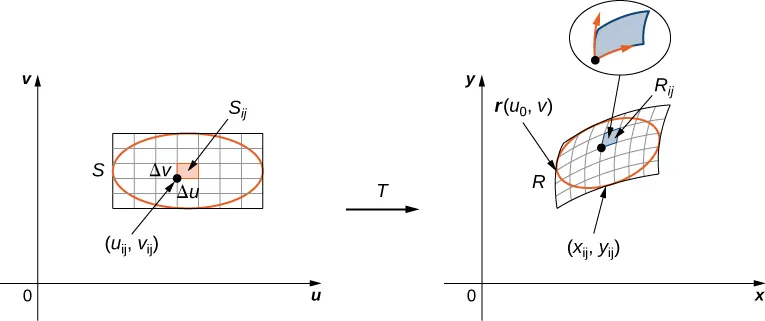
Figura 12.7.5 Los subrectángulos $S_{ij}$ en el plano $uv$ se transforman en subrectángulos $R_{ij}$ en el plano $xy$.
Entonces la integral doble se convierte en
Observe que esto es exactamente la suma doble de Riemann para la integral
Teorema 12.7.1. Cambio de Variables para Integrales Dobles
Sea \( T(u, v) = (x, y) \), donde \( x = g(u, v) \) e \( y = h(u, v) \), una transformación \( C^1 \) uno a uno, con un Jacobiano distinto de cero en el interior de la región \( S \) en el plano \( uv \); esta mapea \( S \) en la región \( R \) en el plano \( xy \). Si \( f \) es continua en \( R \), entonces
♦
Con este teorema para integrales dobles, podemos cambiar las variables de \( (x, y) \) a \( (u, v) \) en una integral doble simplemente reemplazando
cuando utilizamos las sustituciones \( x = g(u, v) \) e \( y = h(u, v) \) y luego cambiamos los límites de integración en consecuencia. Este cambio de variables a menudo hace que cualquier cálculo sea mucho más sencillo.
Ejemplo ilustrativo 12.7.5. Cambio de Variables de Coordenadas Rectangulares a Polares
Considere la integral
Utilice el cambio de variables \( x = r \cos \theta \) e \( y = r \sin \theta \), y halle la integral resultante.
Solución:
Primero necesitamos hallar la región de integración. Esta región está limitada por debajo por $y=0$ y por arriba por $y=\sqrt{2x-x^2}$ (véase la siguiente figura).
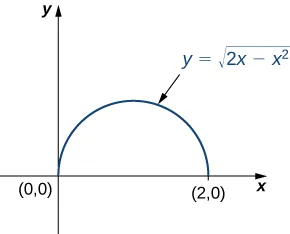
Al elevar al cuadrado y agrupar términos, encontramos que la región es la mitad superior del círculo \( x^2 + y^2 – 2x = 0 \), es decir, \( y^2 + (x – 1)^2 = 1 \). En coordenadas polares, el círculo es \( r = 2 \cos \theta \), por lo que la región de integración en coordenadas polares está acotada por \( 0 \leq r \leq 2 \cos \theta \) y \( 0 \leq \theta \leq \frac{\pi}{2} \).
El Jacobiano es \( J(r, \theta) = r \), como se mostró en el Ejemplo 12.7.3. Dado que \( r \geq 0 \), tenemos \( |J(r, \theta)| = r \).
El integrando \( \sqrt{x^2 + y^2} \) cambia a \( r \) en coordenadas polares, por lo que la integral iterada doble es
♦
Ejercicio de control 12.7.3
Considerando la integral
utilice el cambio de variables \( x = r \cos \theta \) e \( y = r \sin \theta \), y halle la integral resultante. ♦
Fíjate en el siguiente ejemplo que la región sobre la que vamos a integrar puede sugerir una transformación adecuada para la integración. Esta es una situación común e importante.
Ejemplo ilustrativo 12.7.6. Cambio de Variables
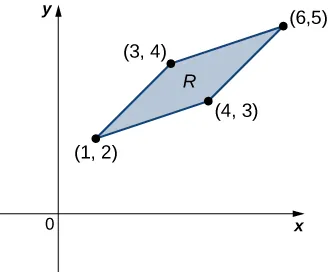
Considere la integral $\iint_R (x-y)\,dy\,dx$, donde $R$ es el paralelogramo que une los puntos $(1,2)$, $(3,4)$, $(4,3)$ y $(6,5)$ (Figura 12.7.7). Realice los cambios de variables apropiados y escriba la integral resultante.
Solución:
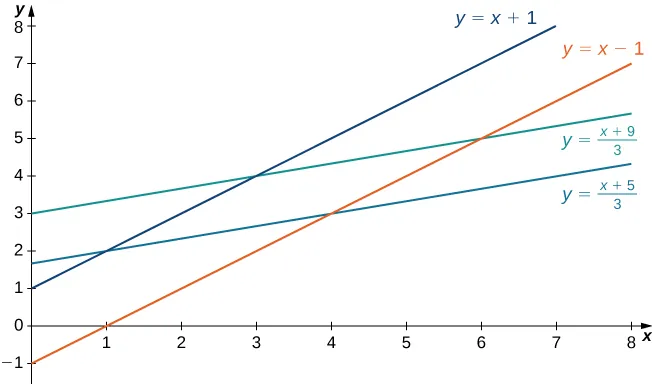
Primero, necesitamos entender la región sobre la cual vamos a integrar. Los lados del paralelogramo son \( x – y + 1 = 0 \), \( x – y – 1 = 0 \), \( x – 3y + 5 = 0 \), y \( x – 3y + 9 = 0 \) (Figura 12.7.8). Otra forma de verlos es \( x – y = -1 \), \( x – y = 1 \), \( x – 3y = -5 \), y \( x – 3y = -9 \).
Claramente, el paralelogramo está acotado por las líneas \( y = x + 1 \), \( y = x – 1 \), \( y = \frac{1}{3}(x + 5) \), y \( y = \frac{1}{3}(x + 9) \).
Observe que si hiciéramos \( u = x – y \) y \( v = x – 3y \), entonces los límites de la integral serían \( -1 \leq u \leq 1 \) y \( -9 \leq v \leq -5 \).
Para despejar \( x \) e \( y \), multiplicamos la primera ecuación por 3 y restamos la segunda ecuación, \( 3u – v = (3x – 3y) – (x – 3y) = 2x \). Entonces tenemos \( x = \frac{3u – v}{2} \). Además, si simplemente restamos la segunda ecuación de la primera, obtenemos \( u – v = (x – y) – (x – 3y) = 2y \) y \( y = \frac{u – v}{2} \).
Por lo tanto, podemos elegir la transformación
y calcular el Jacobiano \( J(u, v) \). Tenemos
Por lo tanto, \( |J(u, v)| = \frac{1}{2} \). Además, el integrando original se convierte en
Por consiguiente, mediante el uso de la transformación \( T \), la integral cambia a
la cual es mucho más sencilla de calcular. De hecho, se encuentra fácilmente que es cero. Y este es solo un ejemplo de por qué transformamos integrales de esta manera. ♦
Ejercicio de control 12.7.4
Realice los cambios de variables apropiados en la integral \( \iint\limits_{R} \frac{4}{(x – y)^2} \, dy \, dx \), donde \( R \) es el trapecio acotado por las líneas \( x – y = 2 \), \( x – y = 4 \), \( x = 0 \) e \( y = 0 \). Escriba la integral resultante. ♦
Estamos listos para presentar una estrategia de resolución de problemas para el cambio de variables.Estrategia para la Resolución de Problemas
Cambio de Variables
- Bosqueje la región dada por el problema en el plano \( xy \) y luego escriba las ecuaciones de las curvas que forman la frontera.
- Dependiendo de la región o del integrando, elija las transformaciones \( x = g(u, v) \) e \( y = h(u, v) \).
- Determine los nuevos límites de integración en el plano \( uv \).
- Encuentre el Jacobiano \( J(u, v) \).
- En el integrando, reemplace las variables para obtener el nuevo integrando.
- Reemplace \( dy \, dx \) o \( dx \, dy \), el que ocurra, por \( |J(u, v)| \, du \, dv \).
En el siguiente ejemplo, encontramos una sustitución que hace que el integrando sea mucho más sencillo de calcular.
Ejemplo ilustrativo 12.7.7. Evaluando una Integral
Utilizando el cambio de variables \( u = x – y \) y \( v = x + y \), evalúe la integral
donde \( R \) es la región acotada por las líneas \( x + y = 1 \) y \( x + y = 3 \) y las curvas \( x^2 – y^2 = -1 \) y \( x^2 – y^2 = 1 \) (ver la primera región en la Figura 12.7.9).
Solución:
Como antes, primero encuentre la región R y visualice la transformación, de modo que sea más fácil obtener los límites de integración después de realizar los cambios (Figura 12.7.9).
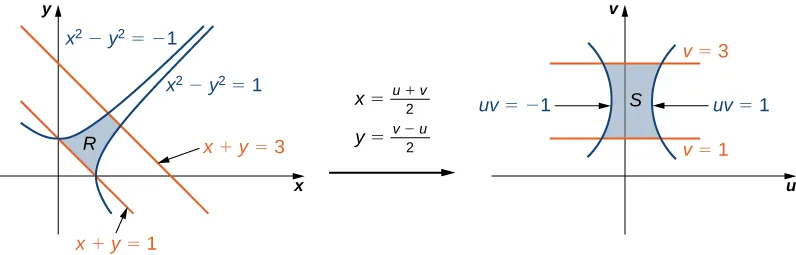
Dado \( u = x – y \) y \( v = x + y \), tenemos \( x = \frac{u + v}{2} \) e \( y = \frac{v – u}{2} \) y, por lo tanto, la transformación a utilizar es \( T(u, v) = \left( \frac{u + v}{2}, \frac{v – u}{2} \right) \). Las líneas \( x + y = 1 \) y \( x + y = 3 \) se convierten en \( v = 1 \) y \( v = 3 \), respectivamente. Las curvas \( x^2 – y^2 = 1 \) y \( x^2 – y^2 = -1 \) se convierten en \( uv = 1 \) y \( uv = -1 \), respectivamente.
Así, podemos describir la región \( S \) (ver la segunda región en la Figura 12.7.9) como
El Jacobiano para esta transformación es
Por lo tanto, al utilizar la transformación \( T \), la integral cambia a
Al realizar la evaluación, tenemos
♦
Ejercicio de control 12.7.5
Utilizando las sustituciones \( x = v \) e \( y = \sqrt{u + v} \), evalúe la integral \[ \iint\limits_{R} y \sin(y^2 – x) \, dA \] donde \( R \) es la región acotada por las líneas \( y = \sqrt{x} \), \( x = 2 \), e \( y = 0 \). ♦
Cambio de Variables para Integrales Triples
El cambio de variables en integrales triples funciona exactamente de la misma manera. Las sustituciones por coordenadas cilíndricas y esféricas son casos especiales de este método, el cual demostramos aquí.
Suponga que \( G \) es una región en el espacio \( uvw \) y se mapea a \( D \) en el espacio \( xyz \) (Figura 12.7.10) mediante una transformación \( C^1 \) uno a uno \( T(u, v, w) = (x, y, z) \) donde \( x = g(u, v, w) \), \( y = h(u, v, w) \), y \( z = k(u, v, w) \).
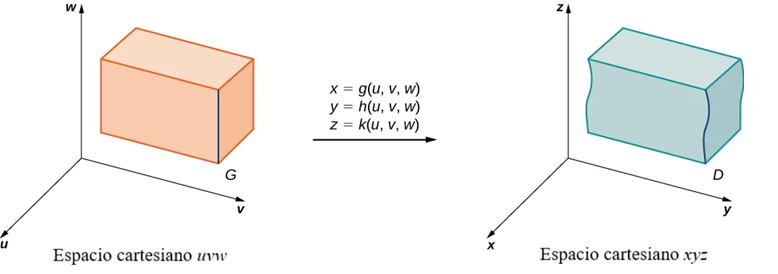
Entonces, cualquier función \( F(x, y, z) \) definida en \( D \) puede pensarse como otra función \( H(u, v, w) \) que está definida en \( G \):
Ahora necesitamos definir el Jacobiano para tres variables.
Definición
El determinante Jacobiano \( J(u, v, w) \) en tres variables se define de la siguiente manera:
Esto también es lo mismo que
El Jacobiano también puede denotarse simplemente como \( \frac{\partial(x, y, z)}{\partial(u, v, w)} \).
♦
Con las transformaciones y el jacobiano para tres variables, estamos listos para establecer el teorema que describe el cambio de variables para integrales triples.
Teorema 12.7.2. Cambio de Variables para Integrales Triples
Sea \( T(u, v, w) = (x, y, z) \), donde \( x = g(u, v, w) \), \( y = h(u, v, w) \), y \( z = k(u, v, w) \), una transformación \( C^1 \) uno a uno, con un Jacobiano distinto de cero, que mapea la región \( G \) en el espacio \( uvw \) a la región \( R \) en el espacio \( xyz \). Al igual que en el caso bidimensional, si \( F \) es continua en \( R \), entonces
♦
Veamos ahora cómo los cambios en las integrales triples para coordenadas cilíndricas y esféricas se ven afectados por este teorema. Esperamos obtener las mismas fórmulas que en Integrales Triples en Coordenadas Cilíndricas y Esféricas.
Ejemplo ilustrativo 12.7.8. Obteniendo las Fórmulas en Integrales Triples para Coordenadas Cilíndricas y Esféricas
Deduzca la fórmula en integrales triples para:
- coordenadas cilíndricas y
- coordenadas esféricas
Solución:
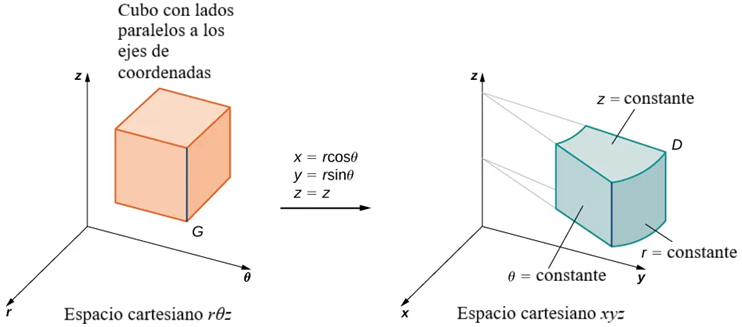
a. Para coordenadas cilíndricas, la transformación es \( T(r, \theta, z) = (x, y, z) \) del plano \( r\theta z \) cartesiano al plano \( xyz \) cartesiano (Figura 5.81). Aquí \( x = r \cos \theta \), \( y = r \sin \theta \), y \( z = z \). El Jacobiano para la transformación es
Sabemos que \( r \geq 0 \), por lo que \( |J(r, \theta, z)| = r \). Entonces la integral triple es
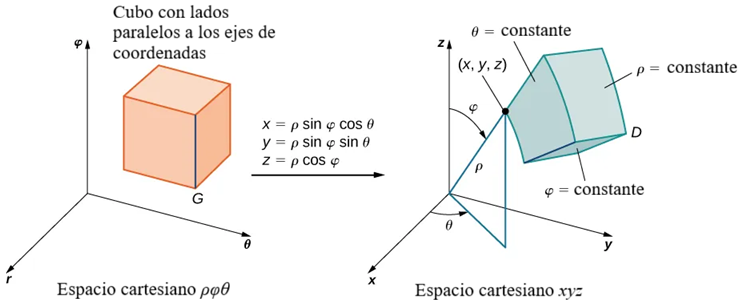
b. Para coordenadas esféricas, la transformación es \( T(\rho, \theta, \varphi) = (x, y, z) \) del espacio \( \rho\theta\varphi \) cartesiano al espacio \( xyz \) cartesiano (Figura 127.12). Aquí \( x = \rho \sin \varphi \cos \theta \), \( y = \rho \sin \varphi \sin \theta \), y \( z = \rho \cos \varphi \). El Jacobiano para la transformación es
Expandiendo el determinante con respecto a la tercera fila:
Como \( 0 \leq \varphi \leq \pi \), debemos tener \( \sin \varphi \geq 0 \). Por lo tanto, \( |J(\rho, \theta, \varphi)| = |-\rho^2 \sin \varphi| = \rho^2 \sin \varphi \).
Entonces la integral triple se convierte en
♦
Intentemos otro ejemplo con una sustitución diferente.
Ejemplo ilustrativo 12.7.9. Evaluando una Integral Triple con un Cambio de Variables
Evalúe la integral triple
en el espacio \( xyz \) mediante el uso de la transformación
Luego integre sobre una región apropiada en el espacio \( uvw \).
Solución:
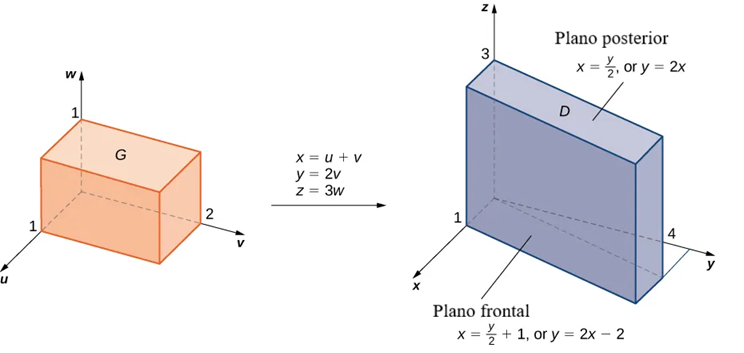
Como antes, algún tipo de bosquejo de la región \( G \) en el espacio \( xyz \) sobre la cual tenemos que realizar la integración puede ayudar a identificar la región \( D \) en el espacio \( uvw \) (Figura 12.7.13). Claramente, \( G \) en el espacio \( xyz \) está acotada por los planos \( x = y/2 \), \( x = (y/2) + 1 \), \( y = 0 \), \( y = 4 \), \( z = 0 \), y \( z = 3 \). También sabemos que tenemos que usar \( u = (2x – y) / 2 \), \( v = y/2 \), y \( w = z/3 \) para las transformaciones. Necesitamos resolver para \( x \), \( y \), y \( z \). Aquí encontramos que \( x = u + v \), \( y = 2v \), y \( z = 3w \).
Usando álgebra elemental, podemos encontrar las superficies correspondientes para la región \( G \) y los límites de integración en el espacio \( uvw \). Es conveniente listar estas ecuaciones en una tabla.
| Ecuaciones en \( xyz \) para la región \( D \) | Ecuaciones correspondientes en \( uvw \) para la región \( G \) | Límites para la integración en \( uvw \) |
|---|---|---|
| \( x = y/2 \) | \( u + v = 2v/2 = v \) | \( u = 0 \) |
| \( x = (y/2) + 1 \) | \( u + v = (2v/2) + 1 = v + 1 \) | \( u = 1 \) |
| \( y = 0 \) | \( 2v = 0 \) | \( v = 0 \) |
| \( y = 4 \) | \( 2v = 4 \) | \( v = 2 \) |
| \( z = 0 \) | \( 3w = 0 \) | \( w = 0 \) |
| \( z = 3 \) | \( 3w = 3 \) | \( w = 1 \) |
Ahora podemos calcular el Jacobiano para la transformación:
La función a integrar se convierte en
Ahora estamos listos para juntar todo y completar el problema.
♦
Ejercicio de control 12.7.6
Sea \( D \) la región en el espacio \( xyz \) definida por \( 1 \leq x \leq 2 \), \( 0 \leq xy \leq 2 \), y \( 0 \leq z \leq 1 \).
Evalúe \[ \iiint\limits_{D} (x^2y + 3xyz) \, dx \, dy \, dz \] mediante el uso de la transformación \( u = x \), \( v = xy \), y \( w = 3z \). ♦